3.5 ねじり振動計
ねじり振動は、回転に伴って発生します。一言にねじり振動といっても、駆動部と負荷部が直結された回転系では、回転部の回転変動により、また歯車、ベルト、チェーン等が組み合わされた多軸系では回転変動に加えて、伝達部の加工精度や変形等による伝達誤差によって引き起こされます。実際の装置では、こうした回転変動やねじり振動、および伝達誤差が複雑に絡み合ってくるのが一般的です。
回転変動、ねじり振動、伝達誤差が発生している系では様々な悪影響が現れます。例えば;
1.振動・騒音の増大
2.位置決め精度の悪化
3.送り精度の悪化
4.疲労破壊
従って、回転部および伝達部を含む系では、回転変動、ねじり振動、伝達誤差の3つを測定し因果関係を解析することが重要となります。
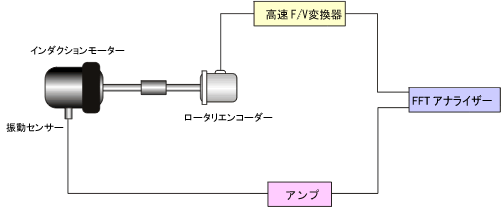
3.5.1 回転変動
回転軸の一点での平均角速度に対する回転角速度の増減(変動)です。測定は、高分解能のロータリエンコーダーを使用し、得られた出力を1パルス毎に高速F/V変換することにより一回転当たりの回転変動として求めます。
|
|
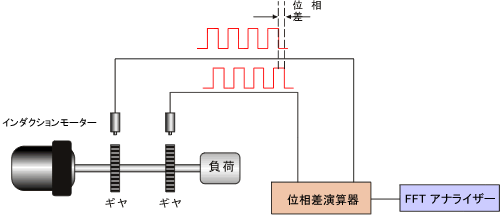
3.5.2 ねじり振動
回転軸の2点間での相対的な角変位の変動です。測定には、一般的に電磁式回転センサーをペアで使用し、駆動側と負荷側の軸のねじれを位相差として検出し、得られた位相差を高速F/V変換した後周波数演算することで求めます。
|
|
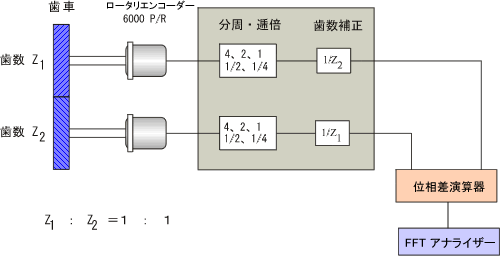
3.5.3 伝達誤差
多軸の回転機械で、伝達装置前後での回転角度の遅れ・進みです。測定は、基本的にはねじり振動検出と同様、伝達装置前後の位相差を検出し、1ピッチ当たりの伝達誤差を求め周波数演算することにより求めます。
|
|
最後に、加速度、速度、変位の相互変換式を掲げておきます。
|
|
上式から周波数fと、変位D、速度V、加速度Gの内の一つが測定できれば、他の2つの物理量は計算で求めることができます。