
![]()
![]()
![]()

Above image:LC-8200A GPS Vector Speedometer
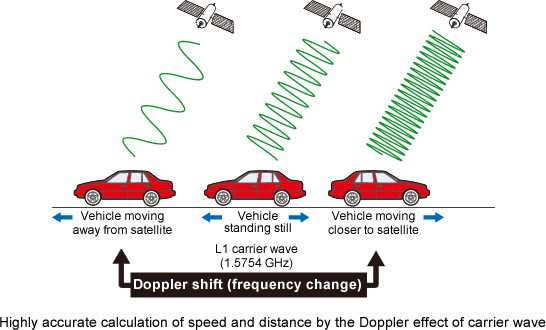
The LC-8000A series are the GPS-based speedometers which measure speed and distance of moving objects with high accuracy. Since the pulse update cycle of 100 Hz and delay time of 5 ms or less, the LC-8000A series make it easier to perform various driving tests such as low-speed driving, acceleration and braking tests. Vector speed measurement has become possible with the LC-8200A. Compact and light-weight system enables easy installation on a vehicle.
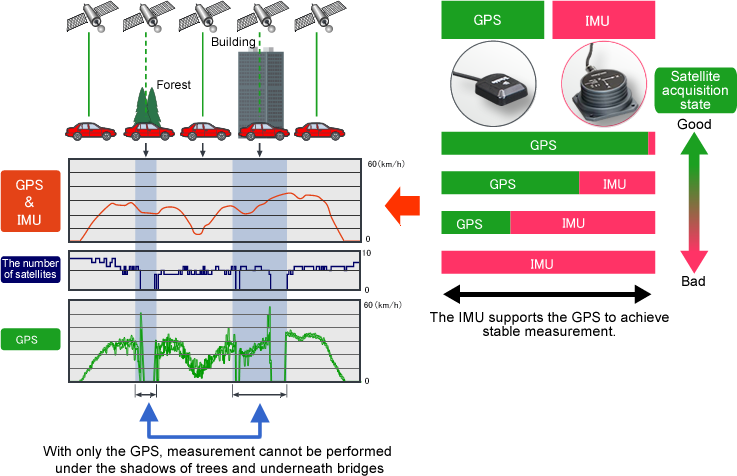
Even under bad GPS signal reception, standard IMU supports precise and stable measurement. A wide range of optional functions are available for various measurements and tests. By connecting the LC-8000A series to a PC, settings of GPS and measurement conditions, logging of speed, distance and other measurement items are enabled.
Highly accurate measurement
Stable measurement
Using IMU, the LC-8000A series enable stable measurement which is not affected by its satellite acquisition state.

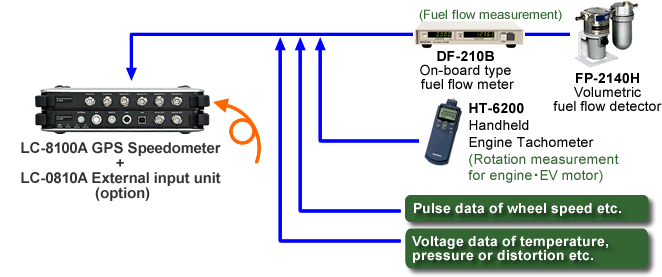
Example of usage <LC-8100A + LC-0810A (External input unit)>
The LC-8200A GPS Vector Speedometer

Optional functions(description of icons)
 BNC
connector on a front panel of LC-0810A BNC
connector on a front panel of LC-0810A D-Sub connector on a rear panel of LC-8200A Provided with 8-ch of analog input and more than 2-ch of pulse signal input. Data logging is enabled by a PC. Input voltage range is 0 to ±10 V, 0 to ±20 V. |
Upper analog output: Item selectable Lower analog output: Speed (standard) |
 Acquisition of CAN data. Compliant with CAN Ver2.0B, up to 32ch. |
 Output of measuring data via CAN communication. The output update rate is every 10 ms. Compliant with CAN Ver2.0B. Specified ID contents can be output as CANdb format. |
|
|
  Since two antennas determine vehicle direction, direction of the vehicle itself can also be found. |
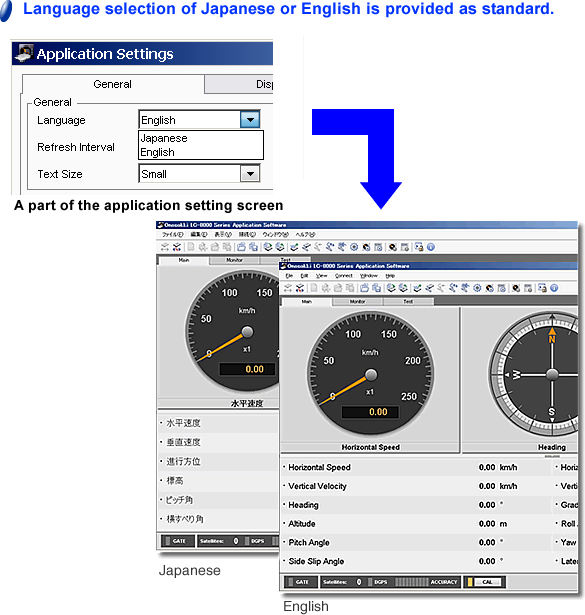
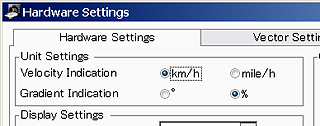 The unit can be selectable, Km or Mile in the setting screen. |
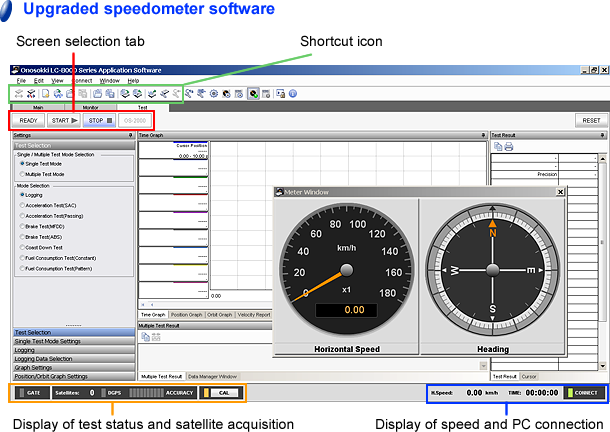
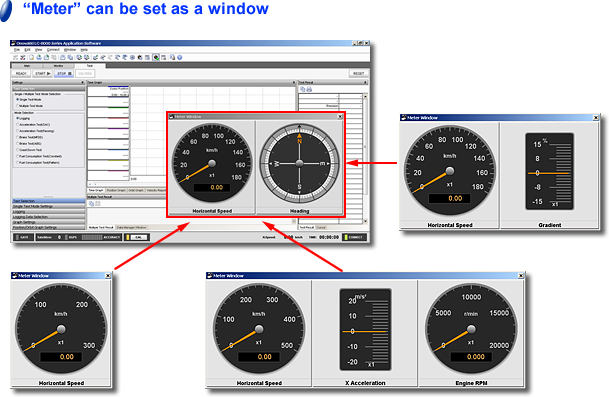
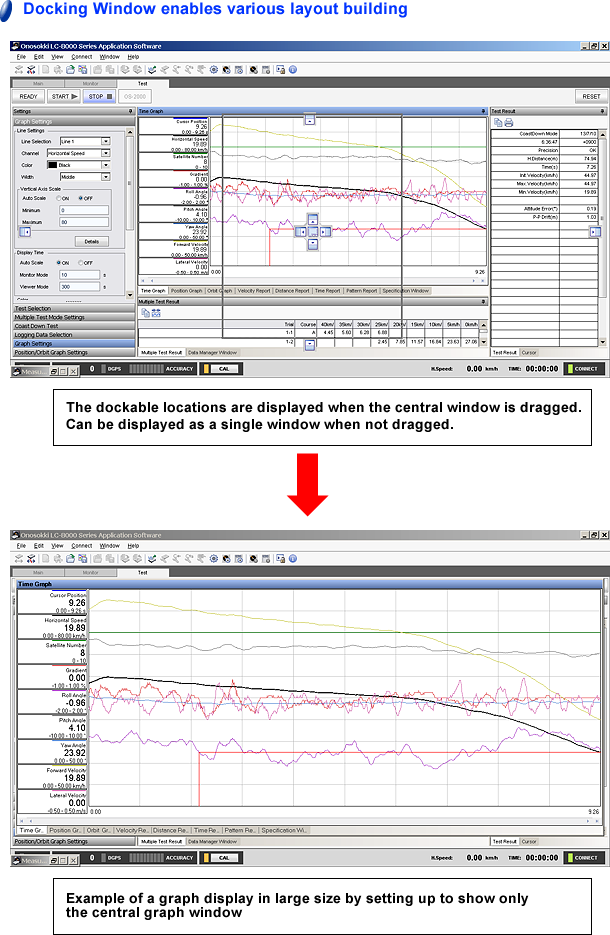
Features of standard software (ver. 2)
Features of optional software (ver. 2)
Functional classification of Software
Data Logging Function
LC-0830 Expansion logging
LC-0831 Acceleration/deceleration test
LC-0832 Fuel consumption test
LC-0833Track display
Only the LC-0830 can change sampling frequency of time-series recorded data. (Sampling frequency of the other optional software: 100 kHz)
Some items can
be recorded when the optional software is installed. (See the
specification table for details.)
Multiple testing function
LC-0830 Expansion logging
LC-0831 Acceleration/ deceleration test
LC-0832 Fuel consumption test
One item of data is created with the ready -> start -> stop measurement sequence. Management of the data generated is important in tests in which this is repeated a large number of times. The multiple testing function manages the results of multiple tests with a data manager. This allows differences in results for each test to be easily verified.
CAN Input Function
LC-0851 CAN input
· Enables CAN data input
· Up to 100 Hz of input sampling.
· Easy setup of
measurement and recording channel, CANdb format file can be
read.
CAN Output Function
LC-0811A CAN output
· Enables CAN data output
· CAN data can be output at a maximum sampling rate of 100 kHz.
· Connection to a CAN recorder is readily achieved with the CANdb format file generation function.
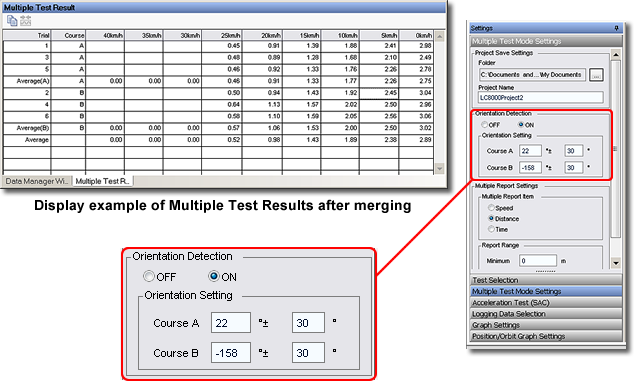
Orientation detection function
LC-0830 Expansion logging
LC-0831 Acceleration/ deceleration test
LC-0832 Fuel consumption test
· Function available for multiple testing
· Used when reciprocal running tests are required.
· By setting the driving direction of the vehicle, recorded data is separated into course A and course B to manage results.
· Average values can be displayed for each course.
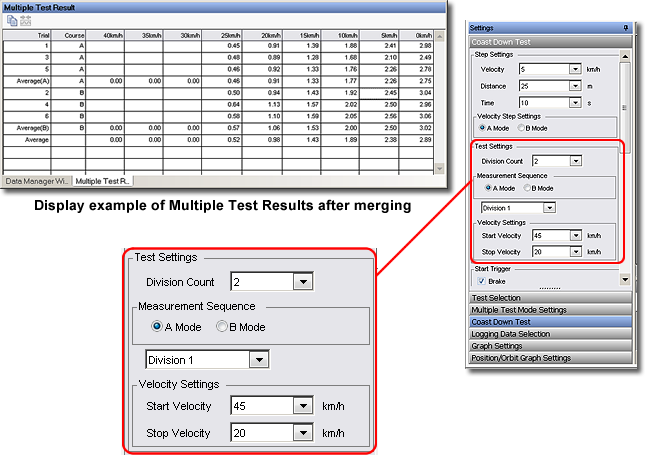
Coasting test function
LC-0831 Acceleration/ deceleration test
· A function available when coasting tests, multiple tests, and the direction cognition function are set.
· Test is started and finished automatically by setting the number of partitions and the test start velocity beforehand.
· Multiple recorded data are displayed together.
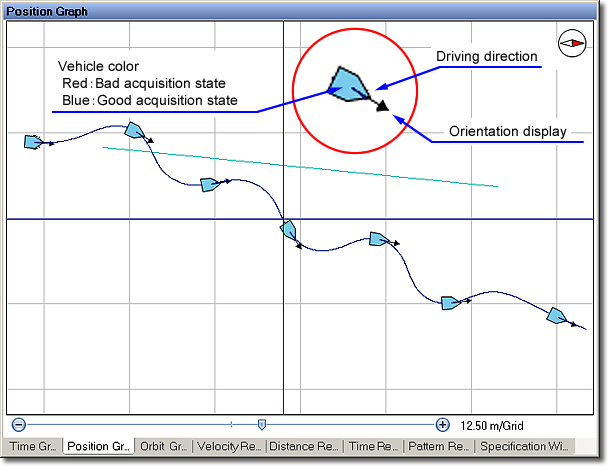
Vehicle path / driving direction display
LC-8200A & LC-0833 Track display
LC-0823 Vector measurement & LC-0833 Track display
· Driving direction, orientation of the vehicle can be displayed as well as the vehicle path.
· The LC-8200A or vector measurement function is required to obtain the driving direction.
Comparative table of measurement items (LC-8100A/LC-8200A)
○: Standard Δ: available as an option X: not available
| Main item | Measurement | PC data logging | ||
|---|---|---|---|---|
| LC-8100A | LC-8200A | LC-8100A | LC-8200A | |
| Horizontal speed | ○ | ○ | ○ | ○ |
| Horizontal distance | ○ | ○ | ○ | ○ |
| Forward speed | Δ*1 | ○*5 | Δ*6 | ○*5 |
| Forward distance | Δ*1 | ○*5 | Δ*6 | ○*5 |
| Lateral speed | Δ*1 | ○*5 | Δ*6 | ○*5 |
| Lateral distance | Δ*1 | ○*5 | Δ*6 | ○*5 |
| Vertical speed | Δ*2 | ○ | Δ*7 | ○ |
| Vertical distance | Δ*2 | ○ | Δ*7 | ○ |
| Slope | Δ*2 | ○ | Δ*7 | ○ |
| Number of satellites | ○ | ○ | ○ | ○ |
| Travel orientation | ○ | ○ | ○ | ○ |
| Latitude | ○ | ○ | ○ | ○ |
| Longitude | ○ | ○ | ○ | ○ |
| Altitude | ○ | ○ | ○ | ○ |
| Sideslip angle | Δ*1 | ○*5 | Δ*6 | ○*5 |
| Yaw, pitch, roll angles | Δ*3 | ○ | Δ*8 | ○ |
| XYZ angular speed(IMU coordinate axes) | Δ*3 | ○ | Δ*8 | ○ |
| XYZ angular speed(IMU coordinate axes) | Δ*3 | ○ | Δ*8 | ○ |
| XYZ acceleration(Vehicle coordinate axes) | Δ*4 | ○ | Δ*9 | ○ |
| XYZ angular speed(Vehicle coordinate axes) | Δ*1 | ○ | Δ*9 | ○ |
| Vehicle posture angle | Δ*1 | ○*5 | Δ*6 | ○*5 |
*1 Available by adding the LC-0823 (Vector measurement
function)
*2 Available by adding the LC-0822 (Vertical direction measurement function)
*3 Available by adding the LC-0821 (IMU data output function)
*4 Available by adding the LC-0821 and LC-0823 (IMU data output function /Vector measurement function)
*5 Available with two or more antennas.
*6 Logging available by adding the LC-0823 (Vector measurement function) and LC-0830 series (software options)
*7 Logging available by adding the LC-0822 (Vertical direction measurement function) and LC-0830 series (software option)
*8 Logging available by adding the LC-0821 (IMU data output function) and LC-0830 series (software option)
*9 Logging available by adding the LC-0821, LC-0823 and LC-0830 series (IMU data output function/Vector measurement function/ software option)
Specification of LC-8100A/8200A
| LC-8100A GPS Speedometer | LC-8200A GPS Vector Speedometer | ||
|---|---|---|---|
| Update frequency | 100 Hz | ||
| Horizontal speed | Measurement range | 0.1 to 500.0 km/h | |
| Accuracy | ±0.1 km/h*1 | ||
| Horizontal distance | Accuracy | ±0.05 %*2 | |
| Forward speed | Measurement range | -(Available by LC-0823) | -500.0 to 500.0 km/h |
| Accuracy | -(Available by LC-0823) | ±0.2 km/h*3 | |
| Forward distance | Accuracy | -(Available by LC-0823) | ±0.1 %*4 |
| Lateral speed | Measurement range | -(Available by LC-0823) | -20.0 to 20.0 m/s |
| Accuracy | -(Available by LC-0823) | ±0.08 m/s*5 | |
| Lateral distance | Accuracy | -(Available by LC-0823) | ±0.15 %*6 |
| Sideslip angle | Measurement range | -(Available by LC-0823) | -25.0 to 25.0° |
| Reference accuracy | -(Available by LC-0823) | 0.15°RMS*7 | |
| Yaw angle | Measurement range | -(Available by LC-0821) | -180.0 to 180.0° |
| Reference accuracy | -(Available by LC-0821) | ±0.1°RMS*8 | |
| Vehicle attitude angle | Measurement range | -(Available by LC-0823) | -180.0 to 180.0° |
| Reference accuracy | -(Available by LC-0823) | ±0.1°RMS*8 | |
| X,Y,Z acceleration | Measurement range | -(Available by LC-0821) | -98.0 to 98.0 m/s2 *9 |
| Linearity | -(Available by LC-0821) | ±0.2 % / FS(Reference accuracy)*9 | |
| X,Y,Z angular speed | Measurement range | -(Available by LC-0821) | -150.0 to 150.0°/s *9 |
| Accuracy | -(Available by LC-0821) | ±0.1 % / FS(Reference accuracy)*9 | |
| Analog (speed)output | Voltage range | 0 to 10 V/0 to 500 km/h(Can be changed by attached software.) | |
| Linearity | ±0.2 % or less | ||
| Load resistance | Load resistance 10 kΩ or more | ||
| Temperature stability | ±0.05 % / FS/°C | ||
| Output delay | 5 ms or less | ||
| Pulse (distance)output | Resolution | 1, 5, 10 mm/P Selectable | |
| Output delay | 5 ms or less | ||
| DUTY | 50 % ±10 % | ||
| Load resistance | Load resistance 10 kΩ or more | ||
| Level | TTL | ||
| Arbitrary analog output |
Item | -(Available by LC-0850) | Selectable 16-ch from Horizontal speed, Forward speed, Lateral speed, Vertical speed, Number of satellites, Travel orientation, North speed, East speed, Sideslip angle, Yaw angle, Pitch angle, Roll angle, IMU coordinate axis XYZ acceleration. IMU coordinate axis XYZ angular speed, Slope angle, Satellite lost flag, Vehicle coordinate axis XYZ acceleration, Vehicle coordinate axis XYZ angular speed, Vehicle attitude angle, Arbitrary position forward speed, Arbitrary position lateral speed, Arbitrary position vertical speed, Arbitrary position sideslip angle. |
| Output voltage | -(Available by LC-0850) | -10.0 to 10.0 V (Changeable using PC software) |
|
| Offset | -(Available by LC-0850) | Within ±50 mV | |
| Linearity | -(Available by LC-0850) | ± 0.5 % / FS | |
| Temperature stability | -(Available by LC-0850) | ± 0.05 % / FS/°C | |
| Output frequency | -(Available by LC-0850) | 100 Hz | |
| Load resistance | -(Available by LC-0850) | 10 kΩ or higher | |
| Output delay | -(Available by LC-0850) | 5 ms | |
| External synchronous output | Function | -(Available by LC-0850) | Synchronous pulse output /Asynchronous clock output |
| Output level | -(Available by LC-0850) | Square wave pulse output:Hi 5±0.5 V, Lo 0.5 V or less | |
| DUTY | -(Available by LC-0850) | At synchronous pulse output:Hi
approx. 1 µs At asynchronous clock output :50±10 % |
|
| Output frequency | -(Available by LC-0850) | 100 Hz | |
| Load resistance | -(Available by LC-0850) | 10 kΩ or more | |
| Analog input | Number of channels | - (Available by LC-0810A or LC-0850) | 8 ch |
| Voltage range | - (Available by LC-0810A or LC-0850) | ±10 V / 20 V | |
| Update frequency | - (Available by LC-0810A or LC-0850) | 100 Hz | |
| Offset | - (Available by LC-0810A or LC-0850) | ±20 mV or less | |
| Linearity | - (Available by LC-0810A or LC-0850) | ±0.5 % / FS | |
| Pulse input | Number of channels | -(Available by LC-0850) | 4 ch:TTL pulse 1 ch:SIN input |
| Conversion | -(Available by LC-0850) | 4 ch TTL:selectable from pulse
count, frequency or duty 1chSIN input:Frequency |
|
| Update frequency | -(Available by LC-0850) | 100 Hz | |
| Frequency range (4ch TTL) | -(Available by LC-0850) | Pulse count:DC to 50 kHz Frequency/duty:1 Hz to 50 kHz |
|
| Frequency range (1ch SIN) | -(Available by LC-0850) | Frequency:1 Hz to 50 kHz | |
| Accuracy (4ch TTL) |
-(Available by LC-0850) | Pulse count:±1 count or less Frequency:input frequency × 0.02 %±1Hz or less Duty conversion:1 kHz or less;±2 % or less, 1 kHz or more;±6 % or less |
|
| Accuracy (1ch SIN) |
-(Available by LC-0850) | Frequency:input frequency × 0.02 %±1 Hz or less | |
| Power supply output | - (Available by LC-0810A or LC-0850) | DC12 ± 2 V(approx.4 VA or less)×1 ch | |
| External trigger input/output | Input | Start, stop signal(non-voltage/voltage contacts) | |
| Output | Gate signal | ||
| PC interface | USB 2.0 | ||
| General specification | Power supply | DC 9 to 32 V/AC 100 to 240 V(when AC adapter used:option) | |
| Power consumption | 30 VA max. | ||
| Operating temperature range | 0 to 50 °C | ||
| Storage temperature range | -10 to 60 °C | ||
| Accessory | Patch antenna (LC-0720), Remote box(LC-0083), Phoenix connector(4P and 2P, 1 piece for each) IMU(LC-0085) and connection cables, DC power supply cable, USB cable, PC standard software, Instruction manual |
High precision
antenna(LC-0086)X 2, Large display unit (LC-0084), Remote box(LC-0083), Phoenix connector(4P and 2P 1 piece for each), IMU unit(LC-0085) and connection cables, DC power cable, USB cable, PC standard software, Antenna&IMU mounting jig (magnetic sheet type), Instruction manual |
|
| Outer dimension(weight) | 271(W)×217(D)×48(H) mm ( approx. 1.4 kg) |
271(W)×217(D)×76(H) mm (approx. 2.2 kg) |
|
| Others | option | Power cable for cigarette lighter socket(LC-0730A), Windshield attachment (LC-0740), Digital printer(DPU-414), tape switch | |
| Carrying case(LC-0813) | Carrying case (LC-0814) | ||
| Recommended PC Operating environment | OS:Windows® XP(SP3)/7[32/64 bit], memory:1 GB or more, HDD:80 GB or more | ||
| CPU:Intel Core 2 Duo / 2 GHz or more, USB:2 ports or more | |||
| Screen resolution at PC operating environment:XGA(1024 ×768)or more | |||
*1:Accuracy at 30 km/h or higher horizontal speed and with 7 or more acquired satellites. ±0.3 km/h at less than
30 km/h horizontal speed and with 7 or more acquired satellites ± 0.6 km/h with fewer than 7 acquired satellites and no multipath effect.
*2:Accuracy over 300 m measurement distance with 30 km/h or more acquired satellites. ±0.3% over 300 m measurement distance at less than
30 km/h horizontal speed and with 7 or more acquired satellites. ±0.5 % with fewer than 7 acquired satellites and no multipath effect.
*3:Accuracy with 2 m distance between antennas at 100 km/h horizontal speed and with 7 or more acquired satellites. ±0.8 km/h with 2 m
distance between antennas at 100 km/h horizontal speed and with 4 or more acquired satellites.
*4:Accuracy with 2m distance between antennas at 100 km/h horizontal speed and with 7 or more acquired satellites.
±0.70 % with 2 m distance between antennas at 100 km/h horizontal speed and with 4 or more acquired satellites.
*5:Accuracy with 2 m distance between antennas at 100 km/h horizontal speed and with 7 or more acquired satellites.
±0.20 m/s with 2 m distance between antennas at 100 km/h horizontal speed and with 4 or more acquired satellites.
*6:Accuracy with 2 m distance between antennas at 100 km/h horizontal speed and with 7 or more acquired satellites. ±0.65 % with 2 m distance
between antennas at 100 km/h horizontal speed and with 4 or more acquired satellites.
*7:Accuracy with 2 m distance between antennas at 30 km/h or higher horizontal speed and with 7 or more acquired satellites.
0.30°RMS with 2 m distance between antennas and 30 km/h or higher horizontal speed and with 4 or more acquired satellites.
*8:Accuracy with 2m distance between antennas and with 7 or more acquired satellites. ±0.2°RMS with 2 m distance
between antennas and with 4 or more acquired satellites.
*9:Available as an option for the LC-8100A GPS Speedometer
* Windows® XP、Windows® 7 are
registered trademarks or trademarks of Microsoft Corporation in the United
States and other countries.
* Intel® Core is a registered trademark of
Intel Corporation in the United States and other countries.
| Product name (Model name) |
External input/output unit (LC-0850) | |
|---|---|---|
| Arbitrary analog output | Item | Selectable16-ch from Horizontal speed, Forward speed, Lateral speed, Vertical speed, Number of satellites, Travel orientation, North speed, East speed, Sideslip angle, Yaw angle, Pitch angle, Roll angle, IMU coordinate axis XYZ acceleration, IMU coordinate axis angular speed, Gradient, Satellite lost flag, Vehicle coordinate axis XYZ acceleration, Vehicle coordinate axis XYZ angular speed, Vehicle attitude angle, Arbitrary position forward speed, Arbitrary position lateral speed, Arbitrary position vertical speed, Arbitrary position sideslip angle. |
| Output voltage | -10.0 to 10.0 V(Can be changed by attached software.) | |
| Offset | ±50 mV or less | |
| Linearity | ± 0.5 % / FS | |
| Temperature stability | ± 0.05 % / FS/°C | |
| Output frequency | 100 Hz | |
| Load resistance | 10 kΩ or more | |
| Output delay | 5 ms | |
| External synchronous output | Function | Synchronous pulse output / Asynchronous clock output |
| Output level | Square wave / pulse output:Hi 5±0.5 V, Lo 0.5 V or less | |
| DUTY | At synchronous pulse output:Hi
approx. 1 µs At asynchronous clock output :50±10 % |
|
| Output frequency | 100 Hz | |
| Load resistance | 10 kΩ or more | |
| Analog output | Number of channels | 8 ch |
| Voltage range | ±10 V / 20 V | |
| Update frequency | 100 Hz | |
| Offset | ±20 mV or less | |
| Linearity | ±0.5 % / FS | |
| Pulse input | Number of channels | 4 ch:TTL pulse 1 ch:SIN input |
| Conversion | 4 ch TTL:pulse count, frequency
or duty 1chSIN input:frequency |
|
| Update frequency | 100 Hz | |
| Frequency range (4ch TTL) |
Pulse count:DC to 50 kHz Frequency/duty:1 Hz to 50 kHz |
|
| Frequency range (1ch SIN) |
Frequency:1 Hz to 50 kHz | |
| Accuracy (4ch TTL) |
Pulse count:±1 count or less Frequency:input frequency × 0.02 %±1Hz or less Duty conversion:1 kHz or less;±2 % or less, 1 kHz or more;±6 % or less |
|
| Accuracy (1ch SIN) |
Frequency:input frequency × 0.02 %±1 Hz or less | |
| Power source output | DC12 ± 2 V(approx. 4 VA or less)×1 ch | |
| Outer dimensions | 271(W)×217(D)×48(H)mm | |
| Product name (model name) |
Externai input unit (LC-0810A) | |
|---|---|---|
| Analog output | Number of channels | 8ch(BNC 4ch) |
| Voltage range | ±10/±20 V | |
| Update frequency | 100 Hz | |
| Offset | ±20 mV or less | |
| Linearity | ±0.5 %/FS | |
| Pulse input | Number of channels | 2ch(BNC×2), input:TTL pulse |
| Conversion | Pulse count, frequency or duty | |
| Update frequency | 100 Hz | |
| Frequency range | Pulse count:DC to 50 kHz Frequency/duty:1 Hz to 50 kHz |
|
| Accuracy | Pulse count:±1 count or less Frequency:input frequency × 0.02 %±1Hz or less Duty conversion:1 kHz or less;±2 % or less, 1 kHz or more;±6 % or less |
|
| Connector | D-Sub15pin、BNC×6 | |
| Power source output | DC12 ± 2 V(approx.4 VA or less)×1 ch | |
| Outer dimensions | 271(W)×217(D)×48(H)mm | |
| Product name (model name) |
IMU unit (LC-0085) | |
|---|---|---|
| Acceleration | Linearity | 0.2 %/FS(Reference accuracy) |
| Measurement range | ±98 m/s2(Reference accuracy) | |
| Angular speed | Linearity | 0.1 %/FS(Reference accuracy) |
| Measurement range | ±150 °/s(Reference accuracy) | |
| Cable | 5 m | |
| Protection class | IP43 | |
| Outer dimensions (weight) |
79(W)×79(D)×41(H)mm (approx. 250 g/when magnet mounted:approx. 500 g) |
|
| Product
name (model name) |
Remote box(LC-0083) |
|---|---|
| Function | Remote control of start/stop command, clear of display |
| SW | START, STOP, RESET, SELECT |
| Outer dimension (weight) |
45(W)×20(D)×115(H)mm (approx.100 g) |
| Product
name (model name) |
CAN input function(LC-0851) |
|---|---|
| Standard | Conforms to Ver. 2.0B |
| Update frequency | 100 Hz |
| Baud rate | Selectable from 125, 250, 500 or 1000 kbps |
| Format | Supports standard ID/extended ID |
| Data | CAN input:32 ch max. can be
acquired. (OBD II protocol can acquire up to 10 items specified measured values.) |
| Accessory | D-Sub 9 pin connector |
| Product
name (model name) |
CAN output function(LC-0811A) |
|---|---|
| Standard | Conforms to ver. 2.0B |
| Update frequency | 100 Hz |
| Baud rate | Selectable from 125, 250, 500 or 1000 kbps |
| Format | Supports standard ID/expansion ID |
| Data | Speed, distance, satellite and other information in one ID(ID can be specified) |
| Accessory | D-Sub 9 pin connector, CAN branch cable(LC-0862) |
| Product
name (model name) |
Compact display unit(LC-0080) | Large display unit(LC-0084) |
|---|---|---|
| Display method | Fluorescent display tube (green) | |
| Function | Display settings,
test start/stop commands, memory commands Display of speed, distance and number of acquired satellites, simple test results Data display format settings (1-line or 2-line) Output commands to optional DPU-414 Digital Printer |
|
| Accessory | Cable | |
| Option | Windshield attachment (LC-0740) | - |
| Outer
dimensions (weight) |
Approx.
180(W)×45(D)×75(H)mm (approx. 300 g) |
Approx.
210(W)×50(D)×71(H)mm (approx. 450 g) |
| Product
name (model name) |
INPUT CONNECTOR BOX (LC-0815) |
OUTPUT CONNECTOR BOX (LC-0819) |
|---|---|---|
| Display method | Converts D-Sub input connector of an external input/output function unit. | Converts D-Sub output connector of an external input/output function unit. |
| Function | BNC×16, D-Sub37pin×1 | |
| Accessory | D-Sub cable | |
| Outer
dimensions (weight) |
Approx.
230(W)×100(D)×28(H)mm (approx. 750 g) |
|
| Product
name (model name) |
Patch antenna(LC-0720A) | High precision antenna(LC-0086) |
|---|---|---|
| Cable length | 5 m | |
| Operating temperature range | -40 to 85 °C | -40 to 70 °C |
| Protection class | - | IP69K |
| Outer
dimensions (weight) |
Approx.
48(W)×40(D)×13(H)mm (approx. 105 g) |
Approx. φ180(D)×70(H) mm (approx.900 g) |
| LC-0730A Power cable for Cigarette lighter socket |
LC-0740 Windshield attachment |
LC-0813 Carrying case (For LC-8100(A)) |
|---|---|---|
 |
 |
 |
| PE1704174 Tape switch |
DPU-414 Digital printer |
LC-0814 Carrying case (for LC-8200(A)) |
|---|---|---|
 |
 |
 |
Revised:2013/12/01

 This
function enables output of measuring data at the main unit as analog
voltage. Output voltage is 10V max. Up to 16 channels can be
selected for data output. Analog output function of speed is
provided as standard.
This
function enables output of measuring data at the main unit as analog
voltage. Output voltage is 10V max. Up to 16 channels can be
selected for data output. Analog output function of speed is
provided as standard. Measurement
of acceleration, angular speed, and angle in XYZ axes of IMU.
Measurement
of acceleration, angular speed, and angle in XYZ axes of IMU. Vertical
direction can be measured by height data acquired using GPS, Z-axis
data acquired using IMU. Thereby, slope can also be measured.
Vertical
direction can be measured by height data acquired using GPS, Z-axis
data acquired using IMU. Thereby, slope can also be measured.