
![]()
![]()
![]()
GPS速度計
LC-8120
GPSベクトル速度計
LC-8220


LC-8120/8220はGPSを利用した速度計で、車両の速度および走行距離を高精度に計測します。
従来品LC-8100A/8200Aでは対応していなかったGLONASS衛星にも対応することで、より安定した計測が可能になりました。
また、LC-8220用アンテナ(LC-0721)はLC-8200A用アンテナ(LC-0086)に比べ小型・軽量で取り扱いが簡単です。
新型アンテナ(LC-0721)は、従来品LC-8200(A)に取り付けて計測することも可能です。
本体付属のIMU(慣性計測ユニット)はオプションの高精度IMUを使用することで、加速度および角速度の直線性を向上することができます。
また、高応答IMUアナログ出力機能(オプション)を追加することでIMUデータのアナログ出力周波数を100 Hzから500 Hzへと上げることも可能です。
その他機能面では、従来機能に加え、白線検知機能(LC-0856)、加加速度計測機能(LC-0871)、平均減速度演算(LC-0831内)オプションが追加可能となり、 より多くの車両試験に対応することができます。
● GPS衛星に加え、GLONASS衛星にも対応
● アンテナ(LC-0721)は小さく薄いため、車両ルーフに取り付けても走行抵抗計測や車両挙動計測への影響が少ない
● IMU(慣性計測ユニット)は角速度の直線性を±0.1 %/F.S.から± 0.03 %/F.S.に変更可能(オプション)
● 高応答IMUアナログ出力機能でアナログ出力周波数を100 Hz から500 Hz に変更可能(オプション)
● 白線検知機能、加加速度計測機能、平均減速度演算など新しいオプションが追加可能
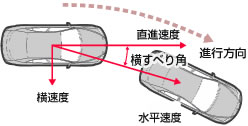
● 直進速度や横速度、横滑り角、勾配などオプション含め30項目以上の計測が1台で可能
(LC-8120は一部オプション)
● アナログ 8 ch、パルス 5 chの信号入力が可能(LC-8120 はオプション)
● 取得データから選択して、3軸加速度、勾配角など16 ch アナログ出力が可能(LC-8220)
● CANデータの取り込みが可能(オプション)
● 衛星ロスト時はLEDとブザーで認識が可能
● トレーサビリティ体系図に準じた校正が可能(トレーサビリティ体系図、試験成績書、校正証明書を提出可能)
● 加減速試験など各種車両試験がソフトウェアオプションにて可能
● LC-8120 はオプションの追加により LC-8220相当にバージョンアップ可能
LC-8120 紹介動画 (LC-8120 は販売終了しました) (YouTube)
高精度データ計測
一般的に、GPS は緯度・経度を測定しますが、LC-8000シリーズは、緯度・経度情報だけでなく、衛星より送られる電波と移動体との ドップラー効果で移動体の速度を測るため高精度のデータ計測が可能です。
電波のドップラー効果により高精度な速度・距離データ計測を実現。
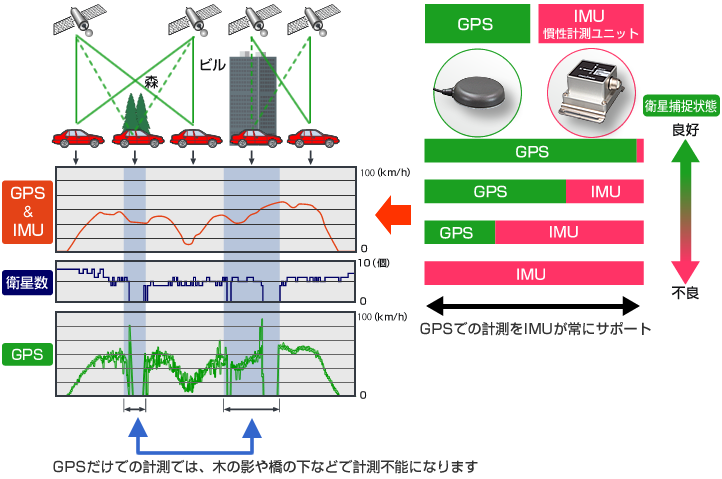
安定計測
一般的に、GPS のみで速度計測する場合は、その衛星捕捉状態に左右されますが、LC-8000シリーズは、IMU (慣性計測ユニット)を使用し、その捕捉状態に 左右されず、安定した計測が可能です。

LC-8220

オプション機能(アイコン説明)

LC-8220 背面 D-Subにて入力可能
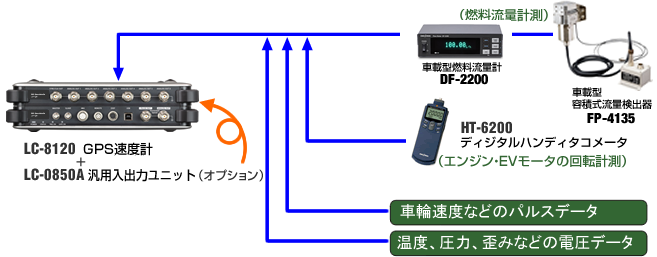
アナログ8ch、パルス5ch 以上の入力が可能。
データは、PCでの
ロギングが可能。
入力電圧レンジは0 ~ ±10 V、0 ~ ±20 V。
LC-8120では、LC-0850A(汎用入出力ユニット)が必要。
 本体で計測しているデータをアナログ電圧で出力する機能。出力電圧は最大10 V。
本体で計測しているデータをアナログ電圧で出力する機能。出力電圧は最大10 V。
多数あるデータのうちから16ch 選択して出力。
また、速度アナログ出力は標準で付属。
LC-8120では、オプションLC-0850A(汎用入出力ユニット)が必要。
※ 写真はLC-8220
上部アナログアウトは、任意設定可能
下部アナログアウトは、速度アナログアウトで標準装備

CAN 通信データを本体に取り込むことが可能。 CAN Ver2.0B 準拠。最大32ch。 LC-8120、LC-8220 共にオプションLC-0851(CAN 入力機 能)が必要。

本体で計測しているデータをCAN 通信で出力します。出力周期は 最大10 ms。CAN Ver2.0B 準拠。設定されたIDなどの内容を CANdbファイルに出力可能。 LC-8120、LC-8220 共に オプションLC-0811A(CAN出力 機能)が必要。
 IMU(慣性計測ユニット)の XYZ 軸
方向の加速度、角速度、角度情報を
計測可能。
LC-8120では、オプション LC-0821
(IMUデータ出力機能)が必要。
IMU(慣性計測ユニット)の XYZ 軸
方向の加速度、角速度、角度情報を
計測可能。
LC-8120では、オプション LC-0821
(IMUデータ出力機能)が必要。
 GPSの高さデータとIMUのZ軸デー
タにて垂直方向計測が可能。垂直方向演算も可能です。
GPSの高さデータとIMUのZ軸デー
タにて垂直方向計測が可能。垂直方向演算も可能です。
LC-8120:オプションLC-0822
(垂直方向測定機能)対応 LC-8200:標準仕様
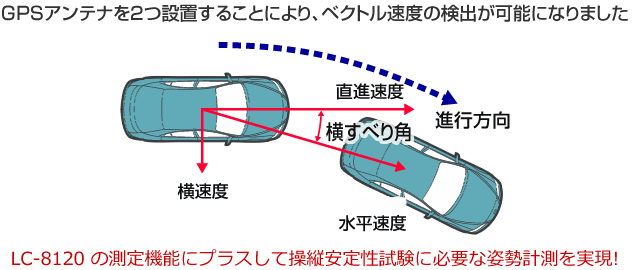
車両進行方向が2アンテナにより定義される事により、車両自体の 向きの計測も可能。 LC-8120では、オプション LC-0823(ベクトル測定機能)が必要。

※ ソフト内設定画面で
km・mile の変更可能。
計測単位をkmから、mileに切り替えます。 LC-8120、LC-8220 共にオプションLC-0820(km/mile 切替機能)が必要。

角速度の直線性を±0.03 %/F.S.以下の高精度計測が可能。
(標準付属のIMUは直線性±0.1 %/F.S.)
LC-8120/8220には、オプションのLC-0855(高精度IMU)が必要です。

LC-8220 (上段)または、LC-0850A より出力される電圧出力のうち、3軸加速度、角速度データを 500 Hz 更新で出力する機能です。この機能は標準付属の IMU(LC-0087)、オプション高精度IMU(LC-0855)に対応しています。
![Oscope[時系列データ解析ツール]への転送が簡単に](images/lc_soft3.gif)
ソフトウェア(バージョン3)オプション機能
機能別ソフトウェア分類
データロギング機能 LC-0833
軌道表示 LC-0832
燃費試験 LC-0831
加減速試験 |
|
|---|---|
|
|
複数試験機能 LC-0832
燃費試験 LC-0831
加減速試験 |
|
 |
|
CAN入力機能 LC-0851 CAN入力 |
CAN出力機能 LC-0811A CAN出力 |
|
|
方位認識機能 LC-0832
燃費試験 LC-0831
加減速試験 |
|
 |
|
分割惰行試験機能 LC-0831 加減速試験 |
|
 |
|
走行軌跡 車両進行方向表示 LC-0823
ベクトル測定 & LC-0833 軌道表示 LC-8220 ベクトル速度計 & LC-0833 軌道表示 |
|
 |
|
LC-8120/LC-8220 計測項目比較表
| 主な項目 | 計 測・PCデータロギング | |
|---|---|---|
| LC-8120(販売終了しました) | LC-8220 | |
| 水平速度・距離 | ○ | ○ |
| 直進速度・距離 | △※1 | ○※5 |
| 横速度・距離 | △※1 | ○※5 |
| 垂直速度・距離 | △※2 | ○ |
| 勾配 | △※2 | ○ |
| 衛星数 | ○ | ○ |
| 進行方位 | ○ | ○ |
| 緯度・経度・標高 | ○ | ○ |
| 横すべり角 | △※1 | ○※5 |
| ヨー、ピッチ、ロール角 | ○※3 | ○ |
| XYZ加速度・角速度(IMU座標軸) | ○※3 | ○ |
| XYZ加速度・角速度(車両座標軸) | ○※4 | ○ |
| 車両姿勢角 | △※1 | ○※5 |
| XYZ加加速度 | △※6 | △※6 |
※1 LC-0823 ベクトル測定機能の追加により可能
※2 LC-0822 垂直方向測定機能の追加で可能
※3 LC-0821 IMUデータ出力機能の追加で可能
※4 LC-0821 IMUデータ出力機能およびLC-0823ベクトル測定機能の追加により可能
※5 アンテナ1個では測定不可
※6 LC-0871 加加速度計測機能の追加により可能
| LC-8120 GPS速度計(販売終了しました) | LC-8220 GPSベクトル速度計 | ||
|---|---|---|---|
| 更新周波数 | 100 Hz | ||
| 水平速度 | 測定範囲 | 0.1 ~ 500.0 km/h | |
| 精度 | ±0.1 km/h*1 | ||
| 水平距離 | 精度 | ±0.05 %*2 | |
| 直進速度 | 測定範囲 | -(LC-0823 にて 対応可) | -500.0 ~ 500.0 km/h |
| 精度 | ±0.2 km/h *3 | ||
| 直進距離 | 精度 | ±0.1 % *4 | |
| 横速度 | 測定範囲 | -20.0 ~ 20.0 m/s | |
| 精度 | ±0.08 m/s *5 | ||
| 横距離 | 精度 | ±0.15 % *6 | |
| 横すべり角 | 測定範囲 | -25.0 ~ 25.0° | |
| 精度 | 0.15° RMS *7(参考精度) | ||
| 車両姿勢角 | 測定範囲 | -180.0 ~ 180.0° | |
| 精度 | 0.1° RMS *8(参考精度) | ||
| ヨー角 | 測定範囲 | -(LC-0821 にて 対応可 | -180.0 ~ 180.0° |
| 精度 | 0.1° RMS *8(参考精度) | ||
| X,Y,Z 加速度 |
測定範囲 | -98.0 ~ 98.0 m/s2 【-49.0~49.0 m/s2 *9】 |
|
| 直線性 | ±0.2 % / FS 【±0.1%/F.S.*9】 |
||
| X,Y,Z 角速度 |
測定範囲 | -150.0 ~ 150.0°/s | |
| 精度 | ±0.1 % / FS 【±0.03%/F.S.*9】 |
||
| アナログ (速度) 出力 |
電圧範囲 | 0 ~ 10 V/0 ~ 500 km/h(付属ソフトウェアにて変更可能) | |
| 出力精度 | ±0.2 %/F.S. | ||
| 負荷抵抗 | 100 kΩ以上 | ||
| 温度安定度 | ±0.05 % / F.S./℃ | ||
| 出力遅れ | 5 ms 以内 | ||
| パルス (距離) 出力 |
分解能 | 1、5、10 mm/P 切替可能 | |
| 出力遅れ | 5 ms以内 | ||
| DUTY | 50 % ±10 % | ||
| 負荷抵抗 | 10 kΩ以上 | ||
| 出力信号 | 矩形波パルス出力:Hi 5 ±0.5 V Lo 0.5 V以下 | ||
| 任意 アナログ 出力 |
項目 | -(LC-0850A にて 対応可) | 水平速度、直進速度、横速度、垂直速度、
衛星数、進行方位、北方向速度、東方向
速度、横すべり角、ヨー角、ピッチ角、
ロール角、IMU座標軸XYZ加速度、
IMU座標軸XYZ角速度、勾配角、衛星ロストフラグ、車両座標軸XYZ加速度、
車両座標軸XYZ角速度、車両姿勢角、IMU座標軸XYZ加加速度 より 16ch を選択 |
| 出力電圧 | -10.0~10.0 V(PCソフトにて変更可能) | ||
| オフセット誤差 | ±5 mV以内 | ||
| 出力精度 | ± 0.1 % / F.S. | ||
| 温度安定度 | ± 0.02 % / F.S./℃ | ||
| 更新周波数 | 100 Hz / 500 Hz *10 | ||
| 負荷抵抗 | 100 kΩ以上 | ||
| 出力遅れ | 5 ms 以内 | ||
| 外部 シンクロ 出力 |
機能 | 同期パルス/非同期クロック出力 | |
| 出力レベル | 矩形波 パルス出力: Hi 5±0.5 V、 Lo 0.5 V 以下 |
||
| DUTY | 同期パルス出力時:Hi 約100 μs 非同期クロック出力時 50±10 % |
||
| 出力周波数 | 100 Hz | ||
| 負荷抵抗 | 10 kΩ以上 | ||
| アナログ入力 | チャンネル数 | 8 ch | |
| 電圧レンジ | ±10 V / 20 V | ||
| サンプリング周波数 | 100 Hz | ||
| オフセット | ±20 mV以内 | ||
| 測定精度 | ±0.5 % / FS | ||
| パルス入力 | チャンネル数 | 4 ch:TTLパルス 1 ch:SIN入力 | |
| 変換 | 4 chTTL:パルスカウント/周波数 /デューティから選択 1chSIN入力:周波数 |
||
| 周波数範囲 (4ch TTL) |
パルスカウント:DC ~ 50 kHz 周波数:1 Hz ~ 50 kHz デューティ:1 Hz ~ 10 kHz |
||
| 周波数範囲 (1ch SIN) |
周波数:1 Hz ~ 50 kHz | ||
| 精度 (4ch TTL) |
パルスカウント:±1 カウント以内 周波数:入力周波数 × 0.02 %±1Hz以内 デューティ変換:1 kHz以下;±2 %以内 1 kHz以上;±6 %以内 |
||
| 精度 (1ch SIN) |
周波数:入力周波数 × 0.02 %±1 Hz以内 | ||
| 電源出力 | DC12 ± 2 V(約4 VA 以内)×1 ch | ||
| 外部トリガ 入出力 |
入力 | 無電圧接点入力:1ch 接点(論理の切替が可能) 電圧入力:5~24 V 入力(論理の切替が可能) 白線検知センサー入力 |
|
| 出力 | ゲート出力:1ch ゲート ON/OFF、矩形波パルス出力、負荷抵抗39 kΩ以上 | ||
| PC インタフェース | USB 2.0 | ||
| 一般仕様 | 使用電源 | DC10~28 V/AC 100 ~ 240 V(ACアダプター使用時:オプション) | |
| 消費電力 | 最大 30 VA | ||
| 使用温度範囲 | 0 ~ 50 ℃ | ||
| 保存温度範囲 | -10 ~ 60 ℃ | ||
| 付属品 | アンテナ(LC-0721)、 リモートボックス(LC-0083)、 フェニックスコネクター 、 IMU(LC-0087)および各接続ケーブル、 DC電源ケーブル、USBケーブル、 PC標準ソフトウェア、取扱説明書 |
アンテナ(LC-0721)X 2、大型表示器(LC-0084)、リモートボックス(LC-0083)、フェニックスコネクター、IMU(LC-0087)および各接続ケーブル、DC電源ケーブル、USBケーブル、PC標準ソフトウェア、アンテナ&IMU設置用マグネットシート、取扱説明書 | |
| 外形寸法(質量) | 約269(W)×180(D)×43(H) mm(突起部含まず) (約 1.4 kg) |
約269(W)×180(D)×71(H) mm(突起部含まず) (約 2.2 kg) |
|
| その他 | オプション | シガーソケット用電源ケーブル(LC-0730B)、フロントガラス取付けアタッチメント(LC-0740)、 デジタルプリンタ(DPU-414)、テープスイッチ、キャリングケース(LC-0813A) |
|
| パソコン 動作推奨環境 |
OS:Windows® 11 / 10 / 7[32/64 bit]、メモリ: 512 MB 以上、 HDD:80 GB以上、CPU:Intel Core 2 Duo / 2 GHz 以上、 USB:USB2.0(High Speed) 1ポート 以上 パソコン動作環境にて画面解像度:XGA(1024 ×768) 以上 .NET Framework3.5 のインストールが必要です。*11 |
||
*1:水平速度 30 km/h 以上、衛星捕捉数 7 個以上での精度。
*2:測定距離 300 mで、水平速度 30 km/h 以上、衛星捕捉数 7 個以上での精度。衛星捕捉数7個以下で マルチパスが無い場合、±0.5 %
*3:アンテナ間距離 2 m、水平速度 100 km/hの時 衛星7個以上時の精度。アンテナ間距離 2 m、水平速度 100 km/hの時 衛星4個以上時の場合、±0.8 km/h。
*4:アンテナ間距離 2 m、水平速度 100 km/hの時 衛星7個以上時の精度。 アンテナ間距離 2 m、水平速度 100 km/hの時 衛星4個以上時の場合、±0.70 %
*5:アンテナ間距離 2 m、水平速度 100 km/hの時 衛星7個以上時の精度。アンテナ間距離 2 m、水平速度 100 km/hの時 衛星4個以上時の場合、±0.20 m/s
*6:アンテナ間距離 2 m、水平速度 100 km/hの時 衛星7個以上時の精度。アンテナ間距離 2 m、水平速度 100 km/hの時 衛星4個以上時の場合、±0.65 %
*7:アンテナ間距離 2 m、水平速度30 km/h以上、衛星7個以上時の精度。アンテナ間距離 2 m、水平速度30 km/h以上、衛星4個以上時の場合、0.30°RMS
*8:アンテナ間距離 2 m、衛星7個以上時の精度。アンテナ間距離 2 m、衛星4個以上時の場合、±0.2°RMS
*9:LC-0855高精度IMUオプション装着時。
*10:高応答出力オプション装着時でアナログ出力のみ対応。
* Windows® 11、Windows® 10、Windows® 7 は、米国 Microsoft Corporation の米国およびその他の国における登録商標または商標です。
* IntelR Core は米国 Intel Corporation の米国およびその他の国における商標です。
*11:Windows® 11、Windows® 10 ではネットワークに接続してインストールする必要があります。
| 品名(型名) | 汎用入出力ユニット(LC-0850A) | ||
|---|---|---|---|
| 任意 アナログ 出力 |
項目 | 水平速度、直進速度、横速度、垂直速度、
衛星数、進行方位、北方向速度、東方向
速度、横すべり角、ヨー角、ピッチ角、
ロール角、IMU座標軸XYZ加速度、
IMU座標軸XYZ角速度、勾配角、衛星ロストフラグ、車両座標軸XYZ加速度、
車両座標軸XYZ角速度、車両姿勢角、 IMU座標軸XYZ加加速度 より 16ch を選択 |
|
| 出力電圧 | -10.0~10.0 V(PCソフトにて変更可能) | ||
| オフセット | ±5 mV以内 | ||
| 出力精度 | ± 0.1 % / FS | ||
| 温度安定度 | ± 0.02 % / FS/℃ | ||
| 更新周波数 | 100 Hz | ||
| 負荷抵抗 | 100 kΩ以上 | ||
| 出力遅れ | 5 ms 以内 | ||
| 外部 シンクロ 出力 |
機能 | 同期パルス/非同期クロック出力 | |
| 出力レベル | 矩形波 パルス出力: Hi 5±0.5 V、Lo 0.5 V 以下 | ||
| DUTY | 同期パルス出力時:Hi 約100 μs 非同期クロック出力時 50±10 % |
||
| 出力周波数 | 100 Hz | ||
| 負荷抵抗 | 10 kΩ以上 | ||
| アナログ入力 | チャンネル数 | 8 ch | |
| 電圧レンジ | ±10 V / 20 V | ||
| サンプリング周波数 | 100 Hz | ||
| オフセット | ±20 mV以内 | ||
| 測定精度 | ±0.5 % / FS | ||
| パルス入力 | チャンネル数 | 4 ch:TTLパルス 1 ch:SIN入力 | |
| 変換 | 4 chTTL:パルスカウント/周波数/デューティから選択 1chSIN入力:周波数 |
||
| 周波数範囲 (4ch TTL) |
パルスカウント:DC ~ 50 kHz 周波数:1 Hz ~ 50 kHz デューティ:1 Hz ~ 10 kHz |
||
| 周波数範囲 (1ch SIN) |
周波数:1 Hz ~ 50 kHz | ||
| 精度 (4ch TTL) |
パルスカウント:±1 カウント以内 周波数:入力周波数 × 0.02 %±1Hz以内 デューティ変換:1 kHz以下;±2 %以内、1 kHz以上;±6 %以内 |
||
| 精度 (1ch SIN) |
周波数:入力周波数 × 0.02 %±1 Hz以内 | ||
| 電源出力 | DC12 ± 2 V(約4 VA 以内)×1 ch | ||
| 外形寸法 | 約269(W)×180(D)×43(H) mm(突起部含まず) | ||
| 品名(型名) | IMU慣性計測ユニット(LC-0087) | ||
|---|---|---|---|
| X,Y,Z加速度 | 直線性 | 0.2 %/FS(参考精度) | |
| 測定範囲 | ±98 m/s2( 参考精度) | ||
| X,Y,Z角速度 | 直線性 | 0.1 %/FS(参考精度) | |
| 測定範囲 | ±150 °/s(参考精度) | ||
| ケーブル | 5 m | ||
| 保護等級 | IP43 | ||
| 外形寸法(質量) | 約56(W)×56(D)×35(H) mm(突起部含まず)(約110 g/マグネットベース装着時:約250 g) | ||
| 品名(型名) | リモートボックス(LC-0083) |
|---|---|
| 機能 | 試験開始・終了の指令、表示部のクリア |
| SW | START、 STOP、 RESET、 SELECT/READY |
| 外形寸法(質量) | 約115(W)×45(D)×20(H) mm(突起部含まず)(約80 g) |
| 品名(型名) | CAN入力機能(LC-0851) |
|---|---|
| 規格 | Ver. 2.0B準拠 |
| 更新周波数 | 100 Hz |
| ボーレート | 125、 250、 500、 1000 kbpsより選択 |
| フォーマット | 標準ID/拡張ID対応 |
| データ | CAN入力:最大32 ch取得可能 OBDⅡプロトコルにより、最大10項目の指定計測値を取得可能 |
| 付属品 | D-Sub9 pinコネクター |
| OBDⅡデータ取得機能 | CAN入力ポート(ポートA:31ch/32 ch)を使用し、データ取得
制限事項: 1.OBDⅡデータ取得機能の有効時にCAN入力ポートAの最大データ取得数は30ch 2.SAE J1979に準拠しておりますが、モデル(車両の型式)やエンジン型式により通信プロトコルが異なる場合は、データ取得できません |
| 品名(型名) | CAN出力機能(LC-0811A) |
|---|---|
| 規格 | Ver. 2.0B準拠 |
| 更新周波数 | OFF/1 Hz/5 Hz/10 Hz/20 Hz/100 Hz から選択 |
| ボーレート | 125、 250、 500、 1000 kbpsより選択 |
| フォーマット | 標準ID/拡張ID対応 |
| データ | ひとつのID内に速度、距離、衛星などの情報を集約。(IDは任意設定可能) |
| 付属品 | D-Sub9 pinコネクター、 CAN分岐ケーブル(LC-0862) |
| 品名(型名) | 小型表示器(LC-0080) | 大型表示器(LC-0084) |
|---|---|---|
| 表示方法 | 蛍光表示管(緑色) | |
| 機能 | 表示設定、試験開始・終了の指令、メモリ指令 速度、距離、衛星捕捉情報の表示、簡易試験結果の表示 1段/2段表示切替等表示モード設定可 オプションであるDPU-414プリンタへの出力指令 |
|
| 付属品 | ケーブル | |
| オプション | フロントガラス取り付けアタッチメント (LC-0740) |
- |
| 外形寸法 (質量) |
約144(W)×41(D)×66(H) mm(突起部含まず) (約300 g) |
約196(W)×50(D)×60(H) mm(突起部含まず) (約450 g) |
| 品名(型名) | INPUT CONNECTOR BOX(LC-0815) | OUTPUT CONNECTOR BOX(LC-0819) |
|---|---|---|
| 機能 | 外部入出力機能ユニットのD-Sub 入力コネクターをBNCに変換 |
外部入出力機能ユニットのD-Sub 出力コネクターをBNCに変換 |
| コネクター | BNC×16、D-Sub37pin×1 | |
| 付属品 | D-Subケーブル | |
| 外形寸法(質量) | 約230(W)×100(D)×28(H) mm(約750 g) | |
| 品名(型名) | GPS/GLONASS アンテナ(LC-0721) |
|---|---|
| ケーブル長 | 約 5 m |
| 使用温度範囲 | -40~85 ℃ |
| 保護等級 | IP67 |
| 外形寸法 (質量) |
Φ57(D)×15(H) mm (約110 g(ケーブル含まず)) |
| 品名(型名) | 白線検知センサー(LC-0856) |
|---|---|
| 電源電圧(消費電流) | DC 12~24 V(30 mA以下) |
| 光源 | 赤色半導体レーザー(波長 655 nm) |
| 射出光出力 | 0.5 mW以下 |
| 検出距離 | 0.2~1.5 m |
| レーザースポット径 | 約6 X 4 mm(距離 1 m以下) |
| ケーブル長 | 約 5 m |
| 反射シート | 付属反射シートを使用(1 m X 2) |
| 使用温度範囲 | 0~50 ℃ |
| 保護等級 | IPX3 |
外形(質量) |
約300(W)×40(D)×45(H) mm(約350 g(ケーブル含まず)) |
その他オプション
| LC-0730B シガーソケット 電源ケーブル |
LC-0740 フロントガラス取付 アタッチメント |
LC-0813A キャリングケース |
|---|---|---|
 |
 |
 |
| LC-0856 白線検知センサー |
PE1704371 テープスイッチ |
DPU-414 デジタルプリンタ |
|---|---|---|
  |
 ※ リード線の色が異なっている場合もありますが、性能に違いはありません |
 |
最終更新日:2024/04/10

