
![]()
![]()
![]()
GPS速度仪
LC-8120
GPS矢量速度仪
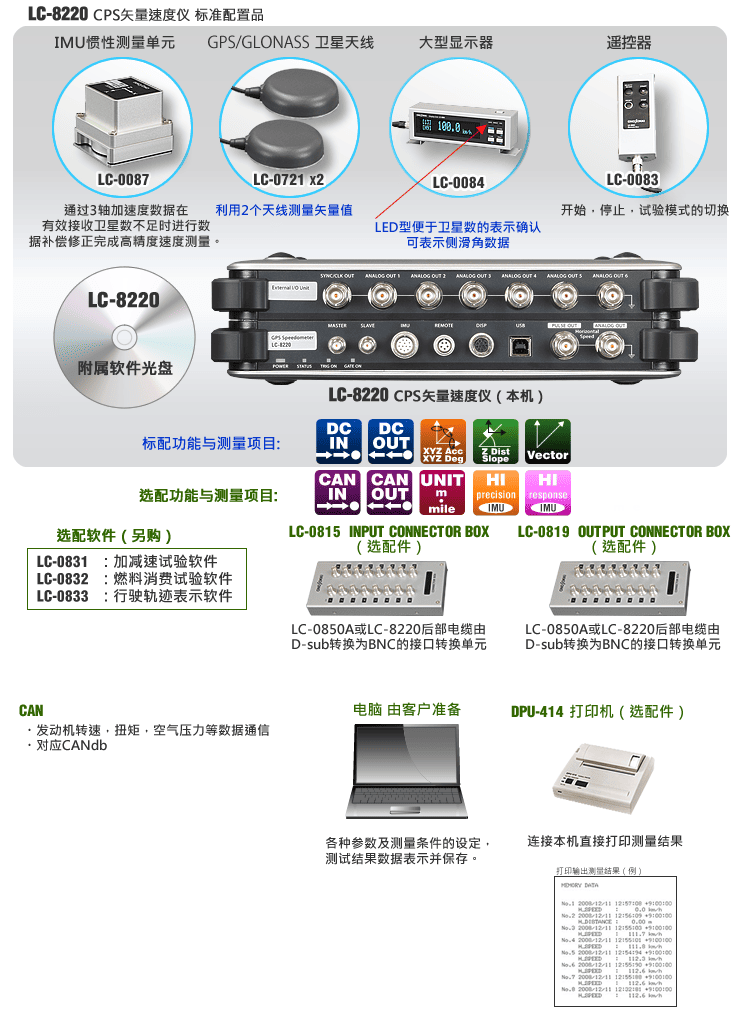
LC-8220
![]()

已经停产

已经停产
LC-8000系列是利用GPS原理的速度计测系统,能高精度测量车辆等的行驶速度和行驶距离。
原LC‒8100A/8200A不能对应的GLONASS卫星信号也能使用对应,测量的安定性得以进一步提升。
同时LC-8220也采用了新型天线(LC-0721),比较LC-8200A的天线(LC-0086)体积小,重量轻,使用更加方便。
并且新型天线(LC-0721)也可配套LC-8200A使用。
本体配套的IMU(惯性测量单元)可使用选配的高精度IMU,由此加速度以及角速度的直线性精度得以提升。
如使用选配功能IMU模拟信号输出功能,IMU测量数据的输出频率可由100 Hz提高到500 Hz。
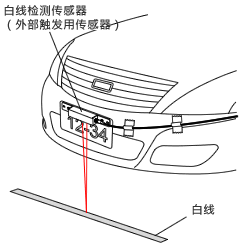
在其他方面在原有功能的基础上新增了,白线检测功能(LC-0856),加加速度测量功能(LC-0871),平均减速测量功能(LC-0831内)等选配功能,可以对应更多的车辆性能试验的测量评价需求。
• GPS卫星以外GLONASS卫星信号也能使用对应
• 新型天线(LC-0721)体积小而薄,并重量轻,设置在车顶时,产生的空气阻力以及对车辆行驶状态的影响都非常小
• IMU(惯性测量单元)的角速度的直线性可由±0.1 %/F.S.提升为±0.03 %/F.S.(选配功能)
• 高速响应IMU模拟信号输出功能可由100 Hz提升为500 Hz(选配功能)
• 新增加了白线检测功能,加加速度测量功能,平均减速测量功能等选配功能
• 1台可完成直进速度,横向速度,侧滑角,坡度等包括选配功能的30项目以上的测量分析(LC-8120包含部分选配功能)
• 模拟信号输入8通道,脉冲信号输入5通道(LC-8220为标配,LC-8120为选配)
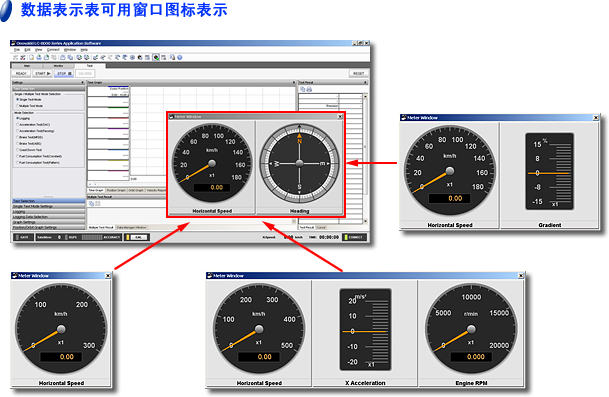
• 在各种测量数据中可选择,3轴加速度,倾斜角等16个数据的模拟信号输出(LC-8220)
• 可读取CAN的数据(选配功能)
• 卫星信号不足时可通过LED与提示声进行状态提示
• 具有可追踪校准体系(具备可追踪校准体系图,试验成绩书,校准证明书)
• 加减速试验等各种车辆试验提供多种测试应用选配
• LC-8120通过增加选配功能可升级到LC-8220
高精度数据测
通常,GPS系统可测量经度及纬度数据,LC-8000系列不仅测量经度及纬度数据,并且通过由卫星传来的信号波与移动物体间产生的多普勒效应,即可实现高精度测量移动物体的移动速度。
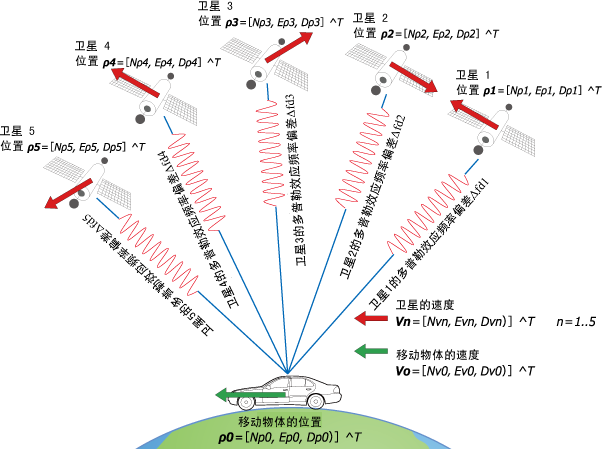
通过卫星信号波与移动物体间产生的多普勒效应,实现高精度测量速度与距离。
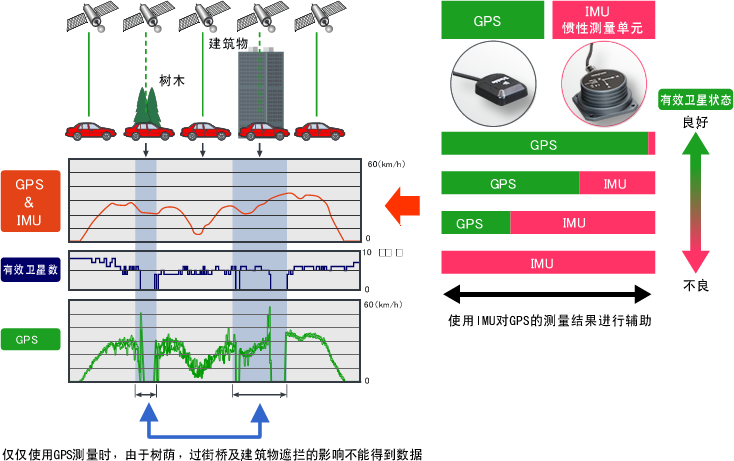
稳定测量
通常,使用GPS信号测量速度时,接受的卫星信号数影响其测量效果,LC-8000系列使用IMU惯性测量单元,可以消除卫星信号不足的影响进行稳定的测量。

LC-8220
选配功能说明
LC-8220配
LC-8120/8220选配

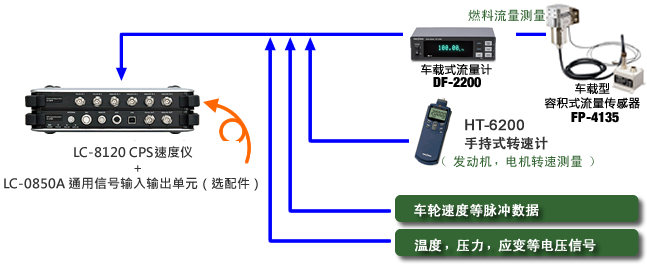
模拟信号输入8通道,脉冲信号输入2通道以上。使用电脑可进行数据采集记录。电压量程0 ~ ±10 V,0 ~ ±20 V。在LC-8120系统中可配套选配件LC-0850A(信号输入输出单元)使用。
 本机测量的数据进行模拟电压输出的功能。输出电压最大10 V。可从多数测量数据中选择16数据进行16通道输出。另外速度信号配有专用模拟信号输出接口。LC-8120需要配选配LC-0850A(信号输入输出单元)使用。
本机测量的数据进行模拟电压输出的功能。输出电压最大10 V。可从多数测量数据中选择16数据进行16通道输出。另外速度信号配有专用模拟信号输出接口。LC-8120需要配选配LC-0850A(信号输入输出单元)使用。
※ ※ 图片为LC-8220 上部模拟信号输出可任意设定 下部模拟信号输出为速度数据信号( 配)

LC-0851可以采集读取CAN的通信数据。支持CAN Ver. 2.0B。最大32通道。为LC-8120,LC-8220的选配功能。

LC-0811A可将本机的测量数据通过CAN通信功能进行输出。输出周期最大10 ms。支持CAN Ver. 2.0B。设定的ID识别码也可输出至CANdb文件中。为LC-8120,LC-8220的选配功能。
 LC-0821(IMU惯性测量输出功能)可以将IMU(惯性测量单元)的X,Y,Z轴方向加速度,角速度,角度信息等进行测量并输出。LC-8120为选配功能。
LC-0821(IMU惯性测量输出功能)可以将IMU(惯性测量单元)的X,Y,Z轴方向加速度,角速度,角度信息等进行测量并输出。LC-8120为选配功能。

LC-0822(垂直方向测量)可以进行高度数据与IMU的Z轴方向数据测量,由此可以得出倾斜角数据。LC-8120为选配功能。
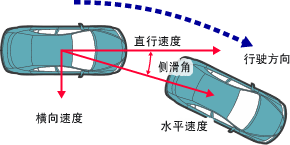
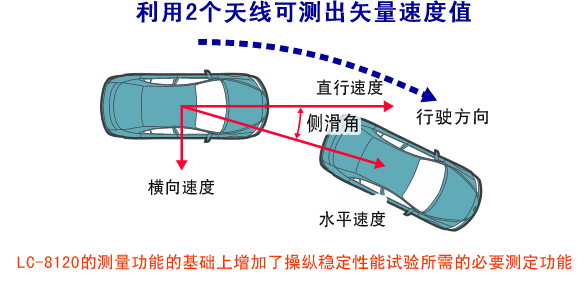
LC-0823 速度矢量测量功能,通过使用2个不同位置设置的天线,按行驶移动方向测量测量出直行,横向速度。LC-8120为选配功能。

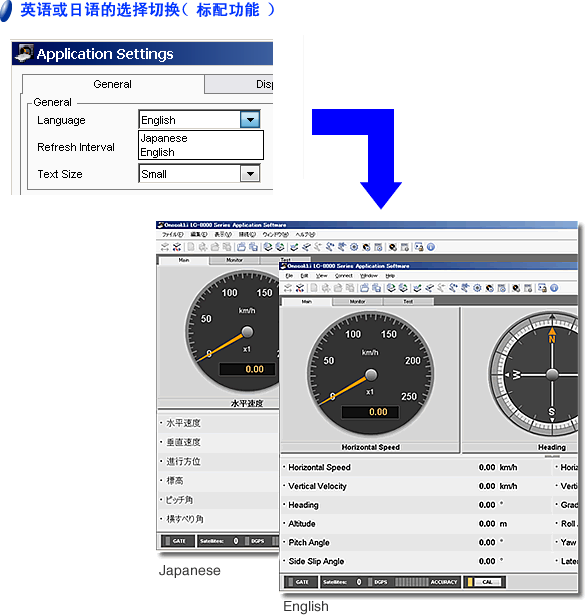
分析软件内可选择设定单位制式。
LC-0820测量数据单位制式选择功能,测量数据的单位可选择测定为km或mile制式。LC-8120与LC-8220均为选配功能。

可实现角速度的直线性为±0.03 %/F.S.以内的高精度测量。 (标配的IMU的直线性精度为±0.1 %/F.S.以内) LC-8120与LC-8220均为选配功能。

可实现500 kHz的高速响应测量。(标配的IMU的输出频率为100 Hz) LC-8120,LC-8220的标配IMU(EC-0087)与选配高精度IMU(LC-0855)都可配套使用(选配功能)。

![Oscope[時系列データ解析ツール]への転送が簡単に](images/lc_soft3c.png)
选配软件(版本3)特长
软件功能分类
数据记录功能 LC-0833
行驶轨迹表示 LC-0832
燃料消耗试验 LC-0831
加减速试验 |
|
|---|---|
|
|
重复性试验功能 LC-0832
燃料消耗试验 LC-0831
加减速试验 |
|
 |
|
CAN规格数据输入功能 LC-0851 CAN规格数据输入 |
CAN规格数据输出功能 LC-0811A CAN规格数据输出 |
|
|
方位認識功能 LC-0832
燃料消耗试验 LC-0831
加减速试验 |
|
 |
|
分段滑行试验功能 LC-0831 加减速试验 |
|
 |
|
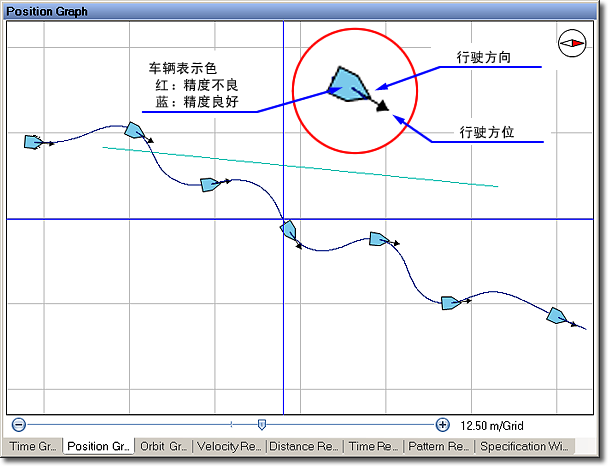
行驶轨迹 行驶方向表示 LC-0823
矢量速度测量 & LC-0833 轨迹表示 LC-8220 矢量速度测量 & LC-0833 轨迹表示 |
|
 |
|
LC-8120/LC-8220功能比较表
| 项目 | 测量 数据采集记录 | |
|---|---|---|
| LC-8120 已经停产 | LC-8220 | |
| 水平速度 距离 | ○ | ○ |
| 直进速度 距离 | △※1 | ○※5 |
| 横向速度 距离 | △※1 | ○※5 |
| 垂直速度 距离 | △※2 | ○ |
| 坡度 | △※2 | ○ |
| 卫星数 | ○ | ○ |
| 行进方位 | ○ | ○ |
| 纬度 经度 高度 | ○ | ○ |
| 侧滑角 | △※1 | ○※5 |
| 偏航角,螺旋角,横摇角 | ○※3 | ○ |
| XYZ加速度 角速度 (IMU坐标轴) | ○※3 | ○ |
| XYZ加速度 角速度(车辆坐标轴) | ○※4 | ○ |
| 车辆姿态角 | △※1 | ○※5 |
| XYZ加加速度 | △※6 | △※6 |
※1 LC-0823 矢量速度测量功能追加测量可能。
※2 LC-0822 垂直方向测量功能追加测量可能。
※3 LC-0821 IMU数据输出功能追加测量可能。
※4 LC-0821 IMU数据输出功能与LC-0823 矢量速度测量功能追加测量可能。
※5 使用1个天线不能测量。
※6 LC-0871加加速度测量功能追加测量可能。
| LC-8120 GPS速度仪 已经停产 | LC-8220 GPS矢量速度仪 | ||
|---|---|---|---|
| 更新频率 | 100 Hz | ||
| 水平速度 | 測定範囲 | 0.1 ~ 500.0 km/h | |
| 精度 | ±0.1 km/h*1 | ||
| 水平距离 | 参考精度 | ±0.05 %*2 | |
| 直进速度 | 測定範囲 | -(需要使用LC-0823) | -500.0 ~ 500.0 km/h |
| 参考精度 | ±0.2 km/h *3 | ||
| 直进距离 | 参考精度 | ±0.1 % *4 | |
| 横向速度 | 測定範囲 | -20.0 ~ 20.0 m/s | |
| 参考精度 | ±0.08 m/s *5 | ||
| 横向距离 | 参考精度 | ±0.15 % *6 | |
| 侧滑角 | 測定範囲 | -25.0 ~ 25.0° | |
| 参考精度 | 0.15° RMS *7 | ||
| 姿态角 | 測定範囲 | -180.0 ~ 180.0° | |
| 参考精度 | 0.1° RMS *8 | ||
| 偏航角 | 測定範囲 | -(需要使用LC-0821) | -180.0 ~ 180.0° |
| 参考精度 | 0.1° RMS *8 | ||
| X,Y,Z 加速度 |
測定範囲 | -98.0 ~ 98.0 m/s2 【-49.0~49.0 m/s2 *9】 |
|
| 直线性 | ±0.2 % / FS 【±0.1%/F.S.*9】 |
||
| X,Y,Z 角速度 |
測定範囲 | -150.0 ~ 150.0°/s | |
| 参考精度 | ±0.1 % / FS 【±0.03%/F.S.*9】 |
||
出力 模拟信号输 |
电压范围 | 0 ~ 10 V/0 ~ 500 km/h(可通过配套软件进行变更) | |
| 出力精度 | ±0.2 %/F.S. | ||
| 负载阻抗 | 100 kΩ以上 | ||
| 温度稳定度 | ±0.05 % / F.S./℃ | ||
| 输出延迟 | 5 ms 以内 | ||
| 脉冲信号输出 (距离) |
分解能 | 1、5、10 mm/P 可切换 | |
| 输出延迟 | 5 ms以内 | ||
| DUTY | 50 % ±10 % | ||
| 负载阻抗 | 10 kΩ以上 | ||
| 信号形式 | TTL | ||
出力 模拟信号输出(其他) |
项目 | -(需要使用LC-0850 A) | 水平速度,直进速度,横向速度,垂直速度,卫星数,行进方位,正北方向速度,正东方向速度,侧滑角,偏航角,螺旋角,横摇角,IMU坐标轴XYZ加速度,IMU坐标轴XYZ角速度,坡度,卫星状态,车辆坐标轴XYZ加速度,车辆坐标轴XYZ角速度,姿态角,IMU坐标轴XYZ加加速度等测量值中可选择16个数据 |
| 输出电压 | -10.0~10.0 V(可通过软件设定调整) | ||
| 偏移誤差 | ±5 mV以内 | ||
| 出力精度 | ± 0.1 % / F.S. | ||
| 温度稳定度 | ± 0.02 % / F.S./℃ | ||
| 更新频率 | 100 Hz / 500 Hz *10 | ||
| 负载阻抗 | 100 kΩ以上 | ||
| 输出延迟 | 5 ms 以内 | ||
出力 同步信号输出 |
功能 | 同步脉冲 / 时钟信号输出 | |
| 输出电平 | Lo 0.5 V 以下 矩形波,脉冲:Hi 5±0.5 V,Lo 0.5 V以下 |
||
| DUTY | 同步脉冲:Hi 约1 μs 时钟信号:50±10 % |
||
| 输出频率 | 100 Hz | ||
| 负载阻抗 | 10 kΩ以上 | ||
| 模拟信号输入 | 通道数 | 8 ch | |
| 电压 | ±10 V / 20 V | ||
| 采样频率 | 100 Hz | ||
| 偏置电压 | ±20 mV以内 | ||
| 测量精度 | ±0.5 % / FS | ||
| 脉冲输 | 通道数 | 4 通道:TTL脉冲 1通道:SIN信号 | |
| 转换 | 4通道TTL:脉冲计数/频率2者中选择 1 通道SIN信号:频率 |
||
| 周波数範囲 (4ch TTL) |
脉冲计数:DC ~ 50 kHz 频率:1 Hz ~ 50 kHz |
||
| 周波数範囲 (1ch SIN) |
频率:1 Hz ~ 50 kHz | ||
| 参考精度 (4ch TTL) |
脉冲计数:±1 以内 频率:输入频率× 0.02 %±1 Hz 以内 转换:1 kHz以下,±2 % 以内 |
||
| 参考精度 (1ch SIN) |
输入频率× 0.02 %±1 Hz 以内 | ||
| 电源输 | DC12 ± 2 V(约4 VA 以内),1通道 | ||
| 外部触发 |
输入 | 无电压接点:1通道 |
|
| 输出 | 阈门信号:1通道,阈门ON/OFF,矩形波输出,负载阻抗39 kΩ以上 | ||
| 电脑通信接口 | USB 2.0 | ||
| 一般规 | 使用电 | DC 9 ~ 32 V/AC 100 ~ 240 V(使用AC电源适配器时:选配件) | |
| 消耗功率 | 最大 30 VA | ||
| 使用温度范围 | 0 ~ 50 ℃ | ||
| 保存温度范围 | -10 ~ 60 ℃ | ||
| 附属品 | 天线(LC-0721),遥控器(LC-0083),PHOENIX制接线头(4P与2P各1个), IMU(LC-0087),以及配套电缆,DC电源电缆,USB电缆, 标准配置软件,使用说明书。 |
高精度天线(LC-0721)2个,大型表示器(LC-0084),遥控器(LC-0083),PHOENIX制接线头(4P与2P各1个),IMU(LC-0087),以及配套电缆,DC电源电缆,USB电缆,标准配置软件,天线与IMU固定用具,使用说明书。 | |
| 外观尺寸(重量) | 271(W)×217(D)×48(H) mm(约 1.4 kg) | 271(W)×217(D)×76(H) mm (约 2.2 kg) |
|
| 其他 | 选配件 | 点烟器用电源电缆(LC-0730B),前部挡风玻璃安装附件(LC-0740) 数字式打印机(DPU-414),带式开关 |
|
| 動作推奨環境 配套电脑 | OS:Windows®; 11 / 10 / 7[32/64 bit]、 内存: 512 MB以上、 HDD:80 GB以上 | ||
| CPU:Intel Core 2 Duo / 2 GHz 以上、 USB:USB2.0(High Speed) 2插口以上 | |||
| 显示器画像素:XGA(1024 ×768)以上 | |||
*1:水平速度 30 km/h以上,有效接收卫星数7个以上时的精度。水平速度 30 km/h以下,有效接收卫星数7个以上时的精度为± 0.3 km/h。 有效接收卫星数7个以下并且不存在信号多径现象时的精度为± 0.6 km/h。
*2:水平距离300 m,水平方向的行驶速度30 km/h以上,有效接收卫星数7个以上时的测量精度。水平距离300 m,水平方向的行驶速度30 km/h以下,有效接收卫星数7个以上时的测量精度为±0.3 %。有效接收卫星数7个以下并且不存在信号多径现象时的精度为±0.5 %。
*3:天线间距离为2 m,水平方向的行驶速度100 km/h,有效接收卫星数7个以上时的测量精度。 天线间距离为2 m,水平方向的行驶速度100 km/h,有效接收卫星数4个以上时的测量精度为±0.8 km/h。
*4:天线间距离为2 m,水平方向的行驶速度100 km/h,有效接收卫星数7个以上时的测量精度。 天线间距离为2 m,水平方向的行驶速度100 km/h,有效接收卫星数4个以上时的测量精度为±0.70 %。
*5:天线间距离为2 m,水平方向的行驶速度100 km/h,有效接收卫星数7个以上时的测量精度。 天线间距离为2 m,水平方向的行驶速度100 km/h,有效接收卫星数4个以上时的测量精度为±0.20 m/s。
*6:天线间距离为2 m,水平方向的行驶速度100 km/h,有效接收卫星数7个以上时的测量精度。 天线间距离为2 m,水平方向的行驶速度100 km/h,有效接收卫星数4个以上时的测量精度为±0.65 %。
*7:天线间距离为2 m,水平方向的行驶速度100 km/h,有效接收卫星数7个以上时的测量精度。 天线间距离为2 m,水平方向的行驶速度100 km/h,有效接收卫星数4个以上时的测量精度为0.30°RMS。
*8:天线间距离为2 m,有效接收卫星数7个以上时的测量精度。 天线间距离为2 m,有效接收卫星数4个以上时的测量精度为±0.2°RMS。
*9:使用LC-0855高精度IMU时(选配件)
*10:在配有高速响应输出功能(选配功能)时具有模拟输出。
* Windows® 11, Windows® 10, Windows® 7是微软公司在美国和/或其他国家或地区的商标或注册商标。
* Intel® Core是英特公司在美国和/或其他国家或地区的商标或注册商标。
| 名称(型号) | 外部输入输出信号单元(LC-0850A) | ||
|---|---|---|---|
| 模拟信号输出 (其他) |
项目 | 水平速度,直进速度,横向速度,垂直速度,卫星数,行进方位,正北方向速度,正东方向速度,侧滑角,偏航角,螺旋角,横摇角,IMU坐标轴XYZ加速度,IMU坐标轴XYZ角速度,坡度,卫星状态,车辆坐标轴XYZ加速度,车辆坐标轴XYZ角速度,姿态角,IMU坐标轴XYZ加加速度等测量值中可选择16个数据 | |
| 电压范围 | -10.0~10.0 V(可通过软件设定调整) | ||
| 偏移 | ±5 mV以内 | ||
| 输出精度 | ± 0.1 % / FS | ||
| 温度稳定度 | ± 0.02 % / FS/℃ | ||
| 输出频率 | 100 Hz | ||
| 负载阻抗 | 100 kΩ以上 | ||
| 输出延迟 | 5 ms 以内 | ||
| 同步信号输出 | 功能 | 同步脉冲 / 时钟信号输出 | |
| 输出电平 | 矩形波,脉冲:Hi 5±0.5 V,Lo 0.5 V以下 | ||
| DUTY | 同步脉冲:Hi 約100 μs 时钟信号: 50±10 % |
||
| 输出频率 | 100 Hz | ||
| 负载阻抗 | 10 kΩ以上 | ||
| 模拟信号输入 | 通道数 | 8 通道 | |
| 电压量程 | ±10 V / 20 V | ||
| 采样频率 | 100 Hz | ||
| 偏移 | ±20 mV以内 | ||
| 测量精度 | ±0.5 % / FS | ||
| 脉冲输入 | 通道数 | 4 ch:TTL脉冲 1 ch:SIN输入 | |
| 转换 | 4 通道:TTL脉冲 1 通道:SIN信号 | ||
| 频率范围 (4ch TTL) |
脉冲计数:DC ~ 50 kHz 频率:1 Hz ~ 50 kHz DUTY:1 Hz ~ 10 kHz |
||
| 频率范围 (1ch SIN) |
频率:1 Hz ~ 50 kHz | ||
| 精度 (4ch TTL) |
脉冲计数:±1 以内 频率:输入频率× 0.02 %±1 Hz 以内 转换:1 kHz 以下,±2 % 以内,1 kHz 以上,±6 % 以内 |
||
| 精度 (1ch SIN) |
频率:输入频率 × 0.02 %±1 Hz以内 | ||
| 电源输出 | DC12 ± 2 V(約4 VA 以内)×1 ch | ||
| 外观尺寸 | 約269(W)×180(D)×43(H) mm(不含凸起部分) | ||
| 名称(型号) | IMU惯性测量单元(LC-0087) | ||
|---|---|---|---|
| X,Y,Z加速度 | 直线性 | 0.2 %/FS | |
| 测量范围 | ±98 m/s2( 参考精度) | ||
| X,Y,Z角速度 | 直线性 | 0.1 %/FS | |
| 测量范围 | ±150 °/s | ||
| 电缆长度 | 5 m | ||
| 防护等级 | IP43 | ||
| 外观尺寸 (重量) | 約56(W)×56(D)×35(H) mm(不含凸起部分)(約110 g/装有磁座时:約250 g) | ||
| 名称(型号) | 遥控器(LC-0083) |
|---|---|
| 功能 | 试验开始,结束的控制,表示的总清 |
| SW | START、 STOP、 RESET、 SELECT/READY |
| 外观尺寸(重量) | 約115(W)×45(D)×20(H) mm(突起部含まず)(約80 g) |
| 名称(型号) | CAN信号输入(LC-0851) |
|---|---|
| 标准 | 支持Ver.2.0 B |
| 更新频率 | 100 Hz |
| 传输速率 | 125, 250, 500, 1000 kbps |
| 格式 | 标准ID / 扩张ID |
| 数据 | 最大32通道输入 OBDⅡ方式,最大可取得10个指定项目的测量数据 |
| 附属品 | D-Sub9 pin接头 |
| 名称(型号) | CAN输出功能(LC-0811A) |
|---|---|
| 标准 | Ver. 2.0B準拠 |
| 更新频率 | OFF/1 Hz/5 Hz/10 Hz/20 Hz/100 Hz から選択 |
| 传输速率 | 125、 250、 500、 1000 kbpsより選択 |
| 格式 | 标准ID / 扩张ID |
| 数据 | 在1个ID内汇集速度,距离,卫星数等数据。(ID可任意设定) |
| 附属品 | D-Sub 9 pin接头,CAN分配电缆(LC-0862) |
| 名称(型号) | 小型表示器(LC-0080) | 大型表示器(LC-0084) |
|---|---|---|
| 表示方式 | 绿色荧光管 | |
| 功能 | 设定表示,试验开始,结束的控制表示,存储表示 速度,距离,卫星状态等信息表示,试验结果的简单表示 可选择切换1行或2行表示模式 连接打印机DPU-414(选配件)打印输出 |
|
| 附属品 | 电缆 | |
| 选配件 | 前部挡风玻璃安装附件 (LC-0740) | - |
| 外观尺寸 (質量) |
約144(W)×41(D)×66(H) mm(不含凸起部分) (約300 g) |
約196(W)×50(D)×60(H) mm(不含凸起部分) (約450 g) |
| 名称(型号) | INPUT CONNECTOR BOX(LC-0815) | OUTPUT CONNECTOR BOX(LC-0819) |
|---|---|---|
| 功能 | 外部输入输出单元的D-Sub输入接口 转换为BNC型 |
外部输入输出单元的D-Sub输出接口 转换为BNC型 |
| 形式 | BNC×16、D-Sub37pin×1 | |
| 附属品 | D-Sub电缆 | |
| 外观尺寸 (重量) | 約230(W)×100(D)×28(H) mm(約750 g) | |
| 名称(型号) | GPS/GLONASS天线 (LC-0721) |
|---|---|
| 电缆长度 | 約 5 m |
| 使用温度范围 | -40~85 ℃ |
| 防护等级 | IP67 |
| 外观尺寸 (重量) | φ57(D)×15(H) mm (約110 g(不含电缆) |
| 名称(型号) | 白线检测传感器(EC-0856) |
|---|---|
| 电源电压(消耗功率) | DC 12~24 V(30 mA以下) |
| 光源 | 红色半导体激光(波长 655 nm) |
| 光源输出 | 0.5 mW以下 |
| 检测距离 | 0.2~1.5 m |
| 激光投射点径 | 約6 X 4 mm(距离 1 m以下) |
| 电缆长度 | 约5 m |
| 反射贴片 | 使用附属的反射贴片(1 m X 2) |
| 使用温度范围 | 0~50 ℃ |
| 防护等级 | IPX3 |
外观尺寸 (重量) |
300 X 70 X 45 mm 以内(500 g以内(不含电缆)) |
其他选配件
| LC-0730B 车辆点烟器电源电缆 |
LC-0740 前部挡风玻璃安装附件 |
LC-0813A 携带箱 |
|---|---|---|
 |
 |
 |
| LC-0856 白线检测传感器 |
PE1704371 带式开关 |
DPU-414 数字式打印机 |
|---|---|---|
  |
 |
 |
Revised: 2023/03/02