
![]()
![]()
![]()
电磁式转速传感器工作原理
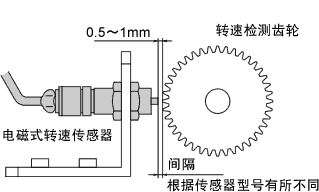

外配检测齿轮型电磁式转速传感器,通常是将传感器头靠近安装在旋转轴上检测齿轮的齿顶端,当旋转轴带着齿轮旋转时,传感器就会感应出与转速成比例的频率信号。因为传感器是由永久磁铁、线圈和U型磁钢组成的,当磁性物体靠近 U 型磁钢时,线圈内的磁通量就会发生变化,在线圈两端建立起一个其频率与磁通量成比例变化的诱导电压。磁通量随着频率 f = 转速(r/min)×齿数/60(Hz) 而波动,作为传感器的转速信号被输出出来。
这种传感器的特点是一,构造简单;二,不要电源;三,体积小、不占地方;四,不需维修保养,测量的可靠性高,因此被大量地应用在各种工业场所。
内装检测齿轮型电磁式转速传感器,是通过联轴节与旋转机械的轴连接在一起,旋转时产生其频率与转速成比例的信号。传感器由永久磁铁、检测齿轮、内齿轮等构成,形成一个封闭的检测磁场回路。当检测齿轮随着传感器的轴作旋转运动时,磁通量就发生变化,在线圈两端建立起一个其频率与磁通量成比例变化的诱导电压。磁通量随着频率 f = 转速(r/min)×齿数/60(Hz) 而波动,作为传感器的转速信号被输出出来。

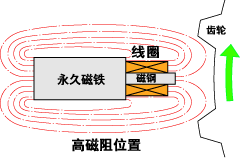
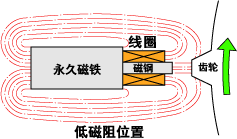
磁电式转速传感器,主要是利用磁阻元件来做转速测量的。磁阻元件有一个特性,就是其阻抗值会随着磁场的强弱而变化。通常磁电式传感器内装有磁性铁,使传感器预先带有一定的磁场,当金属的检测齿轮靠近传感元件时,齿轮的齿顶与齿谷所产生的磁场变化使得传感元件的磁阻抗也跟着变化。但是磁阻元件的阻抗值随温度变化很大,用一个磁阻元件测量转速时,温漂影响非常厉害,这使磁阻元件的应用受到很大的限制。可是我们小野测器的传感器却不同,它采用了2个磁阻元件,不仅补偿了温度的影响,还大大地增强了传感器的灵敏度。
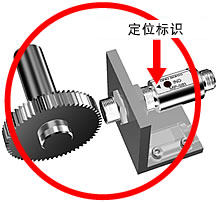
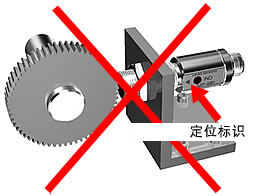
上图所示是磁电式转速传感器的原理图,由两个磁阻元件和两个电阻构成的电桥回路,其差动输出信号即检测信号被取出后直接送到 DC放大器进行放大。这里简单地把框图再说明一下。为了调整两个磁阻元件的阻抗差异,电桥回路里还加入了可调电位器作为阻抗的平衡调整。平衡电桥的输出接 DC放大器。若检测用齿轮采用渐开线齿轮时,输出波形几乎和正弦波差不离。信号经过放大后,被送到整形回路进行整形,使其变成上沿和下沿跳变得更快的矩形波。输出回路采用集电极输出,输出阻抗约为 330Ω 左右。指示器LED会随着输出波形的Hi、Lo变换而点灭。整个电路由 5 V 电压驱动,电路内有 5 V 电压输出的执行器。电源的输入电压与其他传感器相同,为DC12 V±2 V。磁阻元件被封装在传感器的顶端,考虑到安装时有方向性,所以在传感器上标有位置对准的定位标识记号。

LG-9200的测量范围
LG-9200 其实是一个反射型的光电开关。传感器的先端部分采用光纤封装,适应微小物体,特别是微小旋转体的测量。 由于传感器内装有光源(LED)、感光元件(光电晶体管)、以及放大器等,所以体积设计的很小,使用方便。光源是经过频率调制的,所以抗干扰性强,还有状态显示,可供用户测量时确认工作状态。振荡回路是用来产生一个调制频率来点亮光源发光二极管,采用不稳定多谐振荡方式,振荡频率约为7 kHz,脉宽约 25μs。
从光源发射出来的的脉冲光,经过被检测物体的反射,被传感器的光电晶体管所接受,然后经过交流放大器,被放大到适当的电平后,进行检波和积分,再转换成直流电压信号。 然后是波形整形,与一定的直流电压相比较,高于此值,输出为Hi,低于此值,输出为 Lo。状态指示灯也是,输出高电平Hi时,LED 点亮,输出低电平时,LED 不亮,以作为状态确认用。



Revised:2007/8/20