GPS速度計
LC-8000シリーズ 原理
高精度データ計測 -GPSによる速度測定の原理
LC-8310 高感度GPS速度計では、GPS 衛星から出力されている搬送波のドップラー効果から速度を求めています。
ドップラー効果とは、電波や光、音波などの波の発生源と観測者の間に速度差がある場合に、波の周波数が異なって観測される現象で、発生源と観測者が近づいている場合には周波数は高く、遠ざかっている場合には低く観測されます。電波や光のドップラー効果は次の式で表されます。

GPS 衛星の搬送波周波数(L1 帯 fs=1.5754 GHz)は非常に精密に管理されているため、この周波数を測って前述
の式に当てはめることにより、速度V を求めることができます。
ただし、GPS 衛星は高速で移動しています。また地球の自転の影響もあるため、1個の GPS 衛星の搬送波周波数だけでは対地速度を求めることはできません。
そこで次の図に示すように複数(4個以上)の GPS 衛星からの搬送波周波数を測定し、得られた速度を位置と同様の測位演算を施すことにより、移動体の速度を高精度に求めています。
この手法では、電離層の影響をほとんど受けることがないため、位置の変化量から速度を算出する方法と比較して、
極めて高精度に移動体の速度を算出することが可能です。
その水平成分の精度は2 σで0.03 m/s、3 σで0.08 m/
s となります。
なお、垂直成分の精度はこの限りではなく、原理的に衛星が片方向しかないことから水平成分と比較して約3 倍程度精度が悪化します。
上図のイメージから、複数の衛星から移動体が異なるドップラーシフト周波数の電波を受けていることが分かります。
これらの関係を定式化すると、
Δ fd1 = 1/ λ(V0 - V1)・u1
Δ fd2 = 1/ λ(V0 - V2)・u2
Δ fd3 = 1/ λ(V0 - V3)・u3
Δ fd4 = 1/ λ(V0 - V4)・u4
Δ fd5 = 1/ λ(V0 - V5)・u5
となります。
ここで、λは衛星から照射される搬送波の波長で約0.19m、fb は受信機のクロック誤差(Hz)、un(n = 1..5)
は衛星と受信機位置の視線方向単位ベクトルであり、次の式により算出します。
un =ρ n/| ρ n|(n = 1..5)
ρ n =[(Npn - Np0),( Epn - Ep0),( Dpn - Dp0)]T(n = 1..5)
これらの式からVo について解くことにより、移動体の速度を得ることができます。
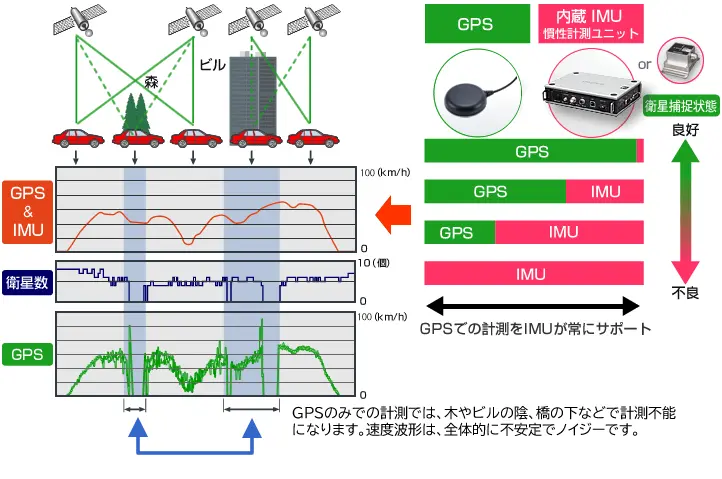
安定計測 -IMUによる補正処理
公道のような木々やビルなどの障害物がある市街地ではマルチパスの影響により、図のようにドップラー方式の速度出力に大きなノイズが生じてしまいます。また、高架橋のような衛星が観測できない場所を通過すると、GPS を使用して単独で速度を計測することは不可能となります。
GPS からの速度情報とIMU の3 軸加速度計/3 軸ジャイロから求めた速度を適正な比で融合することにより、マルチパス環境下においても、下図のようにGPS 単独の場合と比較して非常になめらかで高精度な速度出力を実現しています。
また、高架橋通過時のようなGPS 単独の場合では計測できないような場所においても、IMU を使用することによる速度補間処理を実行することで、速度出力の連続性および短時間のGPS 衛星のロストであれば高精度な速度を出力することが可能です。
最終更新日:2023/04/04