
![]()
![]()
![]()

LC-8300 小型高感度速度計は、 GPS/GLONASS の衛星信号を利用して自動車、自動二輪車、建設機器などの車両計測における速度、距離などのデータを、高機能・高精度に計測する速度計です。
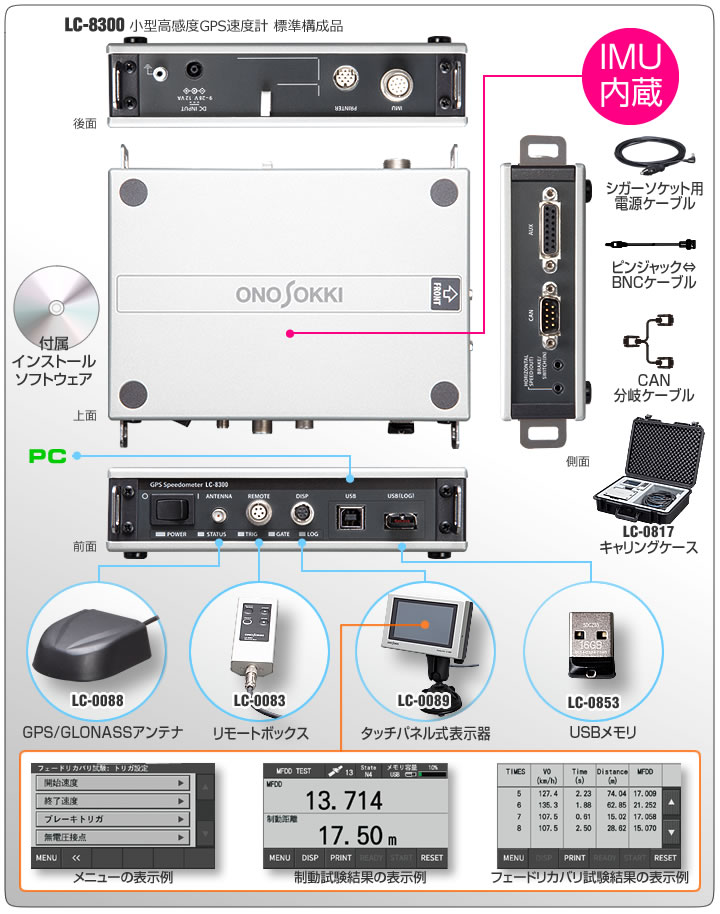
従来のLC-8100A、LC-8200A(以降、従来機種)よりも衛星受信感度をあげており、さらに、GPSとGLONASS 衛星の捕捉を可能としました。本体は 170×120×41(mm)、約0.75 kg と小型軽量で、今まで速度計の設置が困難であった、自動二輪車や建設機器などの省スペース車両へも設置が可能です。USBメモリを付属して、本体から直接メモリへのデータ収録が可能となりましたので、PCレスでの使用が可能です。
精度面では、従来機種で採用した衛星信号と慣性計測ユニット(IMU)の二つの検出器で補間し合って車速計測する方式を踏襲しており、速度精度:±0.2 km/h、距離精度:±0.2 % と高精度です。
機能面では、アナログ 4ch、パルス 1ch、CAN 64ch の入力は標準付属と充実しています。また、タッチパネル式液晶表示器を採用し、操作性、視認性、表現力を向上しております。
さまざまな面でお客様のご要望にお応えした製品に仕上がっております。
LC-8300 紹介動画 (YouTube)
LC-8300 が 日経 xTECH の実車走行試験 で使用されました。
高精度データ計測 -GPSによる速度測定の原理-
LC-8300 小型高感度GPS速度計では、GPS 衛星から出力されている搬送波のドップラー効果から速度を求めています。
ドップラー効果とは、電波や光、音波などの波の発生源と観測者の間に速度差がある場合に、波の周波数が異なって観測される現象で、発生源と観測者が近づいている場合には周波数は高く、遠ざかっている場合には低く観測されます。電波や光のドップラー効果は次の式で表されます。

GPS 衛星の搬送波周波数(L1 帯 fs=1.5754 GHz)は非常に精密に管理されているため、この周波数を測って前述
の式に当てはめることにより、速度V を求めることができます。
ただし、GPS 衛星は高速で移動しています。また地球の自転の影響もあるため、1個の GPS 衛星の搬送波周波数だけでは対地速度を求めることはできません。
そこで次の図に示すように複数(4個以上)の GPS 衛星からの搬送波周波数を測定し、得られた速度を位置と同様の測位演算を施すことにより、移動体の速度を高精度に求めています。
この手法では、電離層の影響をほとんど受けることがないため、位置の変化量から速度を算出する方法と比較して、
極めて高精度に移動体の速度を算出することが可能です。
その水平成分の精度は2 σで0.03 m/s、3 σで0.08 m/
s となります。
なお、垂直成分の精度はこの限りではなく、原理的に衛星が片方向しかないことから水平成分と比較して約3 倍程度精度が悪化します。
上図のイメージから、複数の衛星から移動体が異なるドップラーシフト周波数の電波を受けていることが分かります。
これらの関係を定式化すると、
Δ fd1 = 1/ λ(V0 - V1)・u1
Δ fd2 = 1/ λ(V0 - V2)・u2
Δ fd3 = 1/ λ(V0 - V3)・u3
Δ fd4 = 1/ λ(V0 - V4)・u4
Δ fd5 = 1/ λ(V0 - V5)・u5
となります。
ここで、λは衛星から照射される搬送波の波長で約0.19m、fb は受信機のクロック誤差(Hz)、un(n = 1..5)
は衛星と受信機位置の視線方向単位ベクトルであり、次の式により算出します。
un =ρ n/| ρ n|(n = 1..5)
ρ n =[(Npn - Np0),( Epn - Ep0),( Dpn - Dp0)]T(n = 1..5)
これらの式からVo について解くことにより、移動体の速度を得ることができます。
安定計測 -IMUによる補正処理-
公道のような木々やビルなどの障害物がある市街地ではマルチパスの影響により、図のようにドップラー方式の速度出力に大きなノイズが生じてしまいます。また、高架橋のような衛星が観測できない場所を通過すると、GPS を使用して単独で速度を計測することは不可能となります。
GPS からの速度情報とIMU の3 軸加速度計/3 軸ジャイロから求めた速度を適正な比で融合することにより、マルチパス環境下においても、下図のようにGPS 単独の場合と比較して非常になめらかで高精度な速度出力を実現しています。
また、高架橋通過時のようなGPS 単独の場合では計測できないような場所においても、IMU を使用することによる速度補間処理を実行することで、速度出力の連続性および短時間のGPS 衛星のロストであれば高精度な速度を出力することが可能です。
システム構成
本体試験 /PCソフト試験 計測対応オプション
| LC-8300 小型高感度 GPS 速度計 | ||||
|---|---|---|---|---|
| 本体試験機能(PCレス) |
PCソフト試験 | |||
| 最小構成:本体、アンテナ、表示器、リモコン データ収録先:本体またはUSBメモリ |
最小構成:本体、アンテナ、PC データ収録先:PCハードディスク |
|||
| 発進加速 | LC-0827 本体加速試験機能 |
発進加速 | LC-0831 加減速試験ソフト |
|
| 追越加速 | 追越加速 | |||
| MFDD | LC-0828 本体制動試験機能 |
MFDD | ||
| ABS | ABS | |||
| フェードリカバリ | - | |||
| 惰行 | LC-0829 本体惰行試験機能 |
惰行 | ||
| 定地燃費 | LC-0832 燃費試験ソフト |
|||
| パターン燃費 | ||||
※:上記試験機能は全てオプション機能です
本体試験 計測画面表示例
1.発進加速試験
・車両停止から急加速で設定された速度または距離に到達するまでの時間を計測します
・途中経過データの確認を行います
2.追越加速試験
・設定車速から急加速で設定された速度に到達するまでの時間を計測します
・途中経過データの確認を行います
3.制動試験(MFDD)
・規定車速より上の車速(初速度)から急制動させて停止するまでの時間、距離と制動初速度を計測します
・各パラメーターから求めた減速度と途中経過データの確認を行います
4.制動試験(ABS)
・制動試験で、区間車速の設定と計測します
・各パラメーターから求めた減速度と途中経過データの確認を行います
5.制動試験(フェードリカバリ)
・制動試験を繰返し行い、それぞれMFDDを求めます
・各パラメーターから求めた減速度と途中経過データの確認を行います
6.惰行試験
・規定車速より上の車速から惰性で走行させて停止するまでの時間と速度を計測します
・各パラメーターから求めたCD値と途中経過データの確認を行います
仕様
| 測定精度 | 水平速度 | 測定範囲/精度 | 0.1 ~ 500.0 km/h/±0.2 km/h 以内 (水平速度 30 km/h 以上、衛星7個以上時) |
|---|---|---|---|
| 水平距離 | 精度 | ±0.2 % (直進距離 300 m、水平速度 30 km/h 以上、衛星7個以上時) |
|
| 標準 計測項目 | 水平速度(km/h)、水平距離(m)、時間(s)、UTC時刻 、衛星数 、HDOP(水平精度低下率) 、進行方位(°)、北方向速度(km/h)、東方向速度(km/h)、北方向距離(m)、東方向距離(m)、進行距離(m)、緯度(dms)、経度(dms)、標高(m) | ||
| オプション 計測項目 | 横距離(m)、垂直速度(km/h)、垂直距離(m)、VDOP(垂直精度低下率) 、横流れ量(m)、ロール角(°)、ピッチ角(°)、ヨー角(°)、X軸加速度(m/s2)、Y軸加速度(m/s2)、Z軸加速度(m/s2)、X軸角速度(°/s)、Y軸角速度(°/s)、Z軸角速度(°/s)、勾配(%) | ||
| 更新(出力) 周波数 | 100 Hz | ||
| 一般仕様 | 本体 | 電源/電力 | DC 9 ~ 28 V (非アイソレーション)、AC 100~ 240 V(AC アダプター使用:オプション)/ 最大12 VA (DC電源入力、付属周辺機器接続時) |
| 使用/保存温度 | 0 ~ 50 ℃ /-10 ~ 60 ℃ (湿度20~80 %RH、結露なきこと) |
||
| 外形/質量 | 約170×120×40 mm (突起部含まず) 約0.75 kg |
||
| 表示器 | 外形/質量 | 約132×86×33 mm (突起部含まず) 約0.5 kg |
|
| リモート | 外形/質量 | 約115×45×20 mm (突起部含まず) 約0.08 kg |
|
| アンテナ | 外形/質量 | 約66×50×22 mm(アンテナ部) 約0.1 kg |
|
| 保護等級 | IP67 | ||
| 出力 | 速度アナログ出力 | 範囲 | 0~10 V (SI 単位時:0~10 V/0~500.0 km/h、 mile 単位時:0~10 V/0~250.0 mile/h ) |
| 負荷抵抗 | 10 kΩ以上 SI単位時:10, | ||
| 距離パルス出力 | 分解能 | SI単位時:10, 5, 1 mm/pulse mile単位時:16.0934, 8.0467, 1.6093 mm/pulse から選択 |
|
| 出力遅れ時間 | 10 ms 以内 | ||
| 出力信号 | 矩形波パルス出力 Hi 5 V ±0.5 V Lo 0.5 V 以下 | ||
| デューティ | 50 % ±10 % | ||
| 負荷抵抗 | 負荷1 kΩ以上 | ||
| 備考 | 側面部 HORIZONTAL SPEED コネクターより電圧とパルスから選択して出力 | ||
| 入力 | 電圧入力 | チャンネル数 | 4 |
| 分解能 | 16 | ||
| レンジ | ±20 V | ||
| カットオフ周波数 | 50 Hz | ||
| その他 | 電圧値により計測開始・終了トリガとする機能 CH1:計測開始トリガ、CH2:計測終了トリガとする | ||
| パルス入力 | チャンネル数 | 1 | |
| 入力結合 | ACまたはDC | ||
| 機能 | パルスカウント/周波数/デューティ | ||
| 入力波形 | AC 選択時:正弦波、DC 選択時:矩形波 | ||
| 備考 | 側面部 AUX コネクターよりオプションケーブルにて入力 | ||
| CAN | 共通事項 | ボーレート | 125 k、250 k、500 k、1000 k bps |
| プロトコル | CAN Ver2.0B 準拠 | ||
| 入力 | 入力ポート | 2(ポートA、ポートB) | |
| データ取得数 | 32ch/1ポート(最大64ch) | ||
| その他 | ポートB側はCAN入力を選択している事 | ||
| OBDⅡデータ取得機能 | CAN入力ポート(ポートA:31 ch/32 ch)を使用し、データ取得
制限事項: 1.OBDⅡデータ取得機能の有効時にCAN入力ポートAの最大データ取得数は30 ch 2.SAE J1979に準拠しておりますが、モデル(車両の型式)やエンジン型式により通信プロトコルが異なる場合は、データ取得できません |
||
| 出力※1 | 出力更新周期 | OFF/1 Hz/2 Hz/5 Hz/10 Hz/20 Hz/100 Hz から選択 | |
| 標準 出力項目 | 水平速度(km/h)、速度単位、水平距離(m)、 UTC時刻、衛星数、スタート・ストップ・リセットトリ ガ、GATE状況、内部状況、精度状況、HDOP (水平精度低下率)、進行方位(°)、緯度(dms)、 経度(dms)、標高(m) | ||
| オプション 出力項目 | 垂直速度(km/h)、垂直距離(m)、VDOP(垂直精 度低下率)、横流れ量(m)、ロール角(°)、ピッチ角 (°)、ヨー角(°)、X軸加速度(m/s2)、Y軸加速度 (m/s2)、Z軸加速度(m/s2)、X軸角速度(°/s)、 Y軸角速度(°/s)、Z軸角速度(°/s)、勾配(%) | ||
| その他 | 出力機能有効時ポートB側はCAN入力機能は使用不可 | ||
| 備考 | 側面部 CAN コネクターより入力 | ||
| その他機能 | ブザー、外部トリガ入力、汎用センサー用DC12 V 出力、コンディションメモリ、 オプションプリンタ接続による印字、ストレージ機能 | ||
| 試験機能 | 本体単体での 標準試験機能 | ノーマル測定、区間測定試験 | |
| 本体単体での オプション試験機能 | 発進加速試験、追越加速試験、 制動試験(MFDD)、制動試験(ABS)、 フェードリカバリ試験、惰行試験 |
||
| PCアプリケーションの 標準機能※2 | 基本機能(本体への設定、PC内計測値表示、 Oscopeへの転送機能、他) | ||
| PCアプリケーションの オプション機能※2 | 加減速試験ソフト、燃費試験ソフト、 軌道表示ソフト |
||
| 付属品 | タッチパネル式表示器(3.0 mケーブル付)×1 リモートボックス(2.0 mケーブル付)×1 GPS/GLONASSアンテナ×1 シガーソケット用電源ケーブル(3.0 m)×1 ピンジャック ⇔ BNCケーブル(2.0 m)×2 PC接続用USBケーブル(1.5 m)×1 CAN分岐ケーブル(0.35 m)×1 USBメモリ×1 インストールCD×1 取扱説明書×1 キャリングケース×1 表示器用マウントアダプター×1 マウントアダプター用ベースプレート×1 |
||
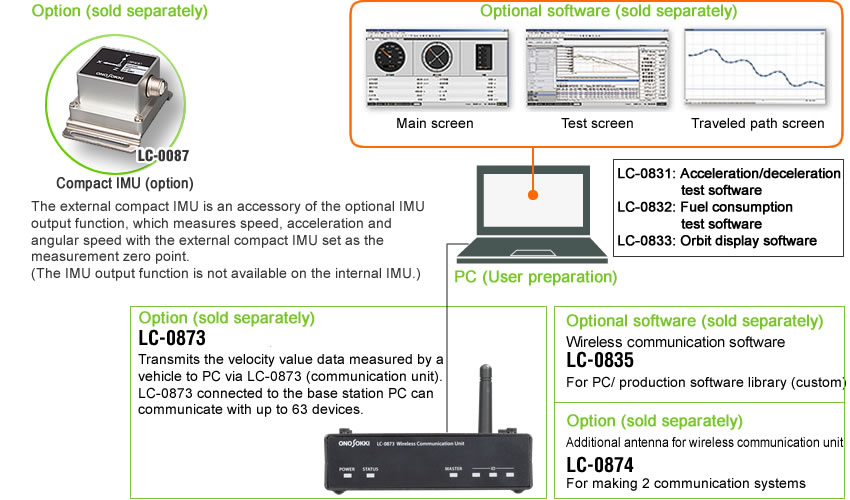
| オプション | <本体側> 電源ケーブル(バッテリ用)【LC-0082】 KM/MILE切り替え機能【LC-0824】 IMUデータ出力機能(小型IMU【LC-0087】付属)【LC-0825】 垂直方向測定機能【LC-0826】 本体加速試験機能【LC-0827】 本体制動試験機能【LC-0828】 本体惰行試験機能【LC-0829】 CAN出力機能【LC-0854】 CAN終端抵抗アダプター【LC-0861】 CAN用分岐ケーブル【LC-0862】 CAN-OBD2ケーブル【LC-0863】 テープスイッチ【LC-0864】 コンパクトサーマルプリンタ【DPU-414】 プリンタ用ACアダプター【PW-C0725-W2-U】 プリンタ用感熱紙【TP-0411】 本体用ACアダプター本体【PS-P20023】 ACアダプター用ケーブル【VM1391-VM1700(日本向け)】 <PC側> 加減速試験ソフト【LC-0831】、燃費試験ソフト【LC-0832】、軌道表示ソフト【LC-0833】 |
||
*1:オプション
*2:PC動作環境参照
PC動作環境
| OS | Windows® 10 / 7 [32/64 bit] |
|---|---|
| メモリー | 512 MB 以上 |
| HDD | 80 GB 以上 |
| CPU | Intel CoreTM2 Duo / 2 GHz 以上 |
| ディスプレイ | XGA(1024X768 )以上 |
| USB | USB2.0(high speed) 1ポート以上 |
| 光学ドライブ | インストールおよびアップデート時に DVD-R、および CD-Rの読込みが可能な光学ドライブ |
| その他 | .NET Framework3.5 のインストールが必要です。*1 |
*Windows® 10, Windows® 7 は、米国Microsoft Corporationの米国およびその他の国における登録商標または商標です。
*Intel、インテル、Intel ロゴ、Intel Core、Core Inside は、アメリカ合衆国および/またはその他の国における Intel Corporation の商標です。
*1 :Windows® 10 ではネットワークに接続してインストールする必要があります。
その他のオプション
| LC-0864 テープスイッチ |
DPU-414 デジタルプリンタ |
LC-0866 汎用入出力ケーブル |
|---|---|---|
 ※ リード線の色が異なっている場合もありますが、性能に違いはありません |
 |
 |
最終更新日:2019/01/07

