![]()
![]()
![]()

近年来,声源声场的表示计算计算取得了迅速的发展,从原来的声压级测量分布表示,声强的矢量表示,进化到使用大量传声器及多通道数据采集处理的声像法及Beamforming法,使得以前难以实现的高精度实时声源声场表示成为现实。
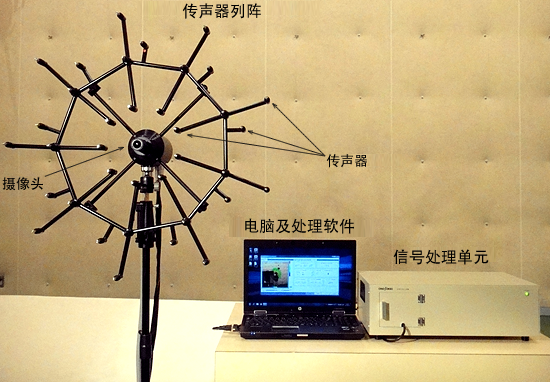
这里介绍的是利用Beamforming法(以下简称为BF法)原理进行实时声源表示的测试系统。
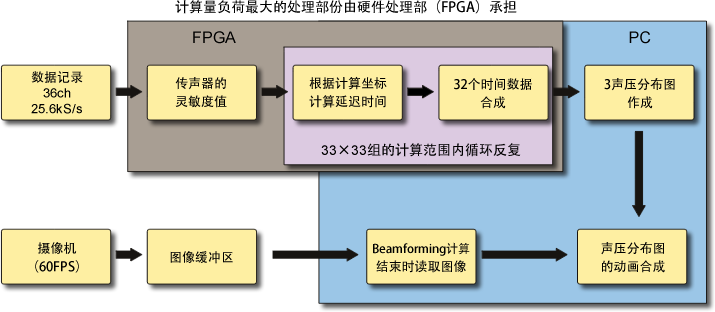
到目前为止,大多数的测试系统都是首先在测量现场记录时间数据,然后进行详细处理解析,将摄像机记录的影像与声压分布进行合成表示,可直观地了解掌握声源位置情况的方法为主流。能够以实时处理的动画影像表示的标准速度1 fps ~ 6 fps,表现非稳态声源,移动声源,在测试现场立刻得到测量解析结果的系统几乎没有。以下介绍的使用BF法的声源表示系统,重视处理表示的实时性,使用的数据采集记录部分,其有关BF法信号处理及动画处理由FPGA(Field Programmable Gate Array)承担,可实现25 fps(40 ms间隔)的高速处理表示。
在测量现场,可通过电脑观察CCD照相机的影像与声源的合成表示,实时观察声源的动态变化,使得分析过程简单明了。
为了缩短测量分析过程的时间提高工作效率,此系统是声源表示分析的最佳选择。
传声器列阵的组成
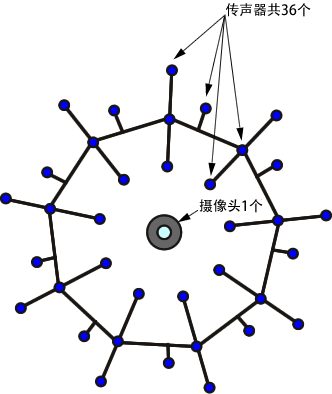
左图所示,传声器列阵共配置36个传声器。
将园9等分,分割为9个区域,每个区域内随机分布设置4个传声器。由于`各个传声器的间隔是随机的,因此从低频到高频的声源都可以扑捉到。
Beamforming法的工作原理
测量用传声器一般没有指向性,将多个测量用传声器设置在一个平面形成列阵时,测量的数据经延迟处理,列阵全体可成为指向性系统。
本系统通过数据的相位处理进行指向性控制完成声压分布图。
根据Beamforming法的工作原理,如果在传声器列阵正面存在声源时,列阵中各个传声器的信号的相位几乎相同,通过叠加可以得到更大的信号。如果声源是在传声器列阵的某一侧面,列阵中各个传声器的信号由于声源的距离不同,到达存在时间差异,通过叠加由于相位的不同信号被相互抵消变小。这样通过传声器列阵的信号叠加处理形成指向性系统。
信号处理流程
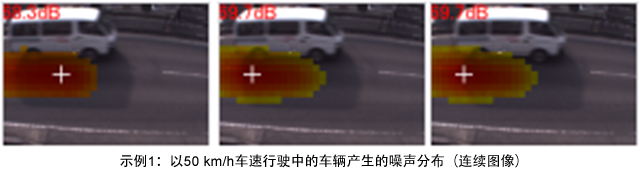
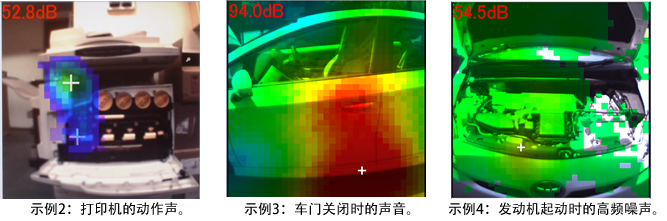
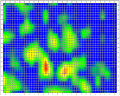
实时声源表示分析处理示例
+:为最大声压位置,左上为其声压级值 |
||
※ 录像回放的速度比实际状态稍有延迟,并且声音被去掉。 |
||
简要规格
| 传声器 | 1/4 英寸传声器 × 36 | 分析结果 | 声压分布 |
|---|---|---|---|
| 测量规格 | 実時間解析周波数バンド×1 (周波数バンドは500 ~ 10 kHz の 範囲で任意設定) |
处理速度 | 40 ms/画面 |
| 采样频率:25.6 kHz | 空间分辨率 | 33×33,1089 数据组(1画面) | |
| 分析频率:500 Hz ~ 10 kHz | 保存数据 | 时间波形及结果画像 | |
| 尺寸,重量 | 列阵直径:0.8 m,重量:8.5 kg | 再处理功能 | 结果画像连续回放,定格回放(向前,向后) 频段指定1频段 |
要点
声场状态表示技术有多种,根据测试分析的对象和目的,选择适当的方法是非常必要的。以下是各种方法的比较请参考。
| Beamforming法 | 声强法 | 声压图法 | ||
|---|---|---|---|---|
| 测量装置的外观 | 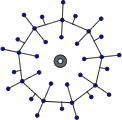 |
 |
||
| 测量结果表示 |  |
 |
 |
|
| 分析结果 | 声压分布 | 声能量的流向分布 | 声压分布 | |
| 声源 | 非稳态 | ○ | × | × |
| 稳态 | ○ | ○ | ○ | |
| 测试时间 | 设置,测量准备 | 30分 | 60分(包含测量点的设定) | 60分(包含测量点的设定) |
| 测量 | 5分 | 取决于测量点数及平均时间 | 取决于测量点数,平均时间,传声器数 | |
| 结果分析评价 | 5分 | 20分 | 20分 | |
| 清理 | 30分 | 15分 | 20分 | |
| 系统 | 测量频率范围 | 500Hz~10kHz | 40Hz~5kHz | 取决于传声器间隔 |
| 与被测物的距离 | 2个波长以上 | 没有限制 | 波长以内 | |
| 空间分辨率 | 33×33 1089 | 与测量距离相关 ±5°的位置精度 |
传声器间隔 | |
| 尺寸 | 传声器列阵直径:800 mm | 探头部 宽:30~70 mm 高:28~55 mm 长:200 mm |
取决于列阵框架 | |
| 重量 | 传声器列阵:8.5 kg | 探头部:0.3 kg | 与传声器数有关 (20组传声器时:1 kg) |
|
| 装置规模 | 中 | 小 | 大(与传声器数有关) | |
3维声强法的测量应用实例
Revised:2012/06/04