ECU最適化支援ツール
ORANGE Navigator & Optimizer
適合運転の計画を簡単設定
様々なアプローチで効率的に適合業務を支援します

CO2排出量の削減に向け、EV・HEV・PHEVといった自動車の電動化が進んでいます。エンジン制御、モーター制御、バッテリの管理等、自動車の制御パラメータは加速度的に増えています。また、燃費を抑えながら排出ガスの排出量も抑えるといった、多目的最適化作業が必要となります。
多目的最適化には、応答曲面法を利用した最適化作業が効率的です。
ORANGE Navigator は、モデル作成のための計測を自動運転で実行します。計測値の監視状況や外部機器の制御設定など、実験計画に関連づけた条件を設定することができます。
ORANGE Optimizer は収集データを基に応答曲面法で最適なECUマップを作成することができます。その時々に合ったアプローチで最適化を行えるため、効率よくECUマップを作成することができます。

定常適合
特長
- 運転スケジュールと実験計画を統合管理、FAMSシステムと連携することで自動運転可能
- 各種実験計画法 (DoE) をサポートし、高次元 (最大20次元) の適合試験の計画を実現
- 温度条件等の監視・制御や計測器構成の指令等を組み込んだ適合試験が可能
- ECUパラメータの限界点探索機能、および境界内計画を装備
- 最大10目的までのローカル多目的最適化、グローバル最適化、なめらかなECUマップ探索が可能
- 走行シミュレーション最適化に汎用運転パターンを反映
- 高次元 (最大20次元) 境界内最適化を実現
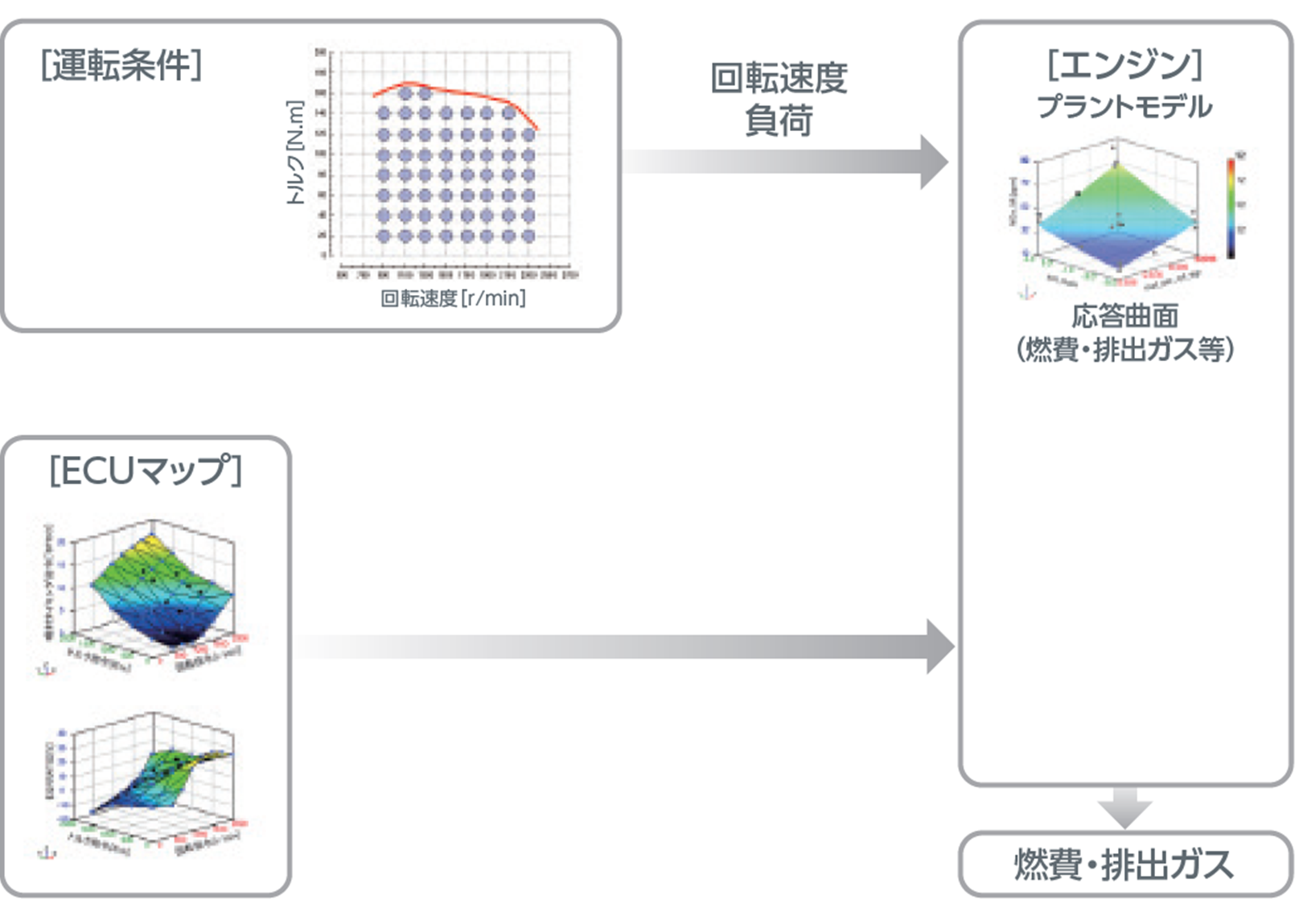
複数の定常モデルを組み合わせて大領域モデルを作成し、運転条件をモデルに入力することで、走行シミュレーションを実施することができます。 モデルに遅れ成分が含まれていないため、正確なシミュレーションにはなりませんが、最適化結果の目安を得ることができます
過渡適合オプション
特長
- 定常モデルをベースに過渡シミュレーションモデルを作成するため、定常適合のデータを有効活用
- 小さい要素モデルを組み合せて大きなモデルを作成できるため、プラントモデルを成長させることが可能
- 過渡モデル作成のための試験でも、ECU通信は従来の規格 (ASAP3) で実現。ECU高速通信は不要
- 過渡運転は台形パターン (スイープ+安定) の繰り返しとなっているため、既存設備で計測可能
- 複数のデータをプロジェクト管理でき、ORANGE NavigatorからORANGE Optimizerへのデータ引き渡しがスムーズ
- シミュレーションする運転パターンを任意に設定でき、仕向け地に合わせた過渡最適化結果を得ることが可能
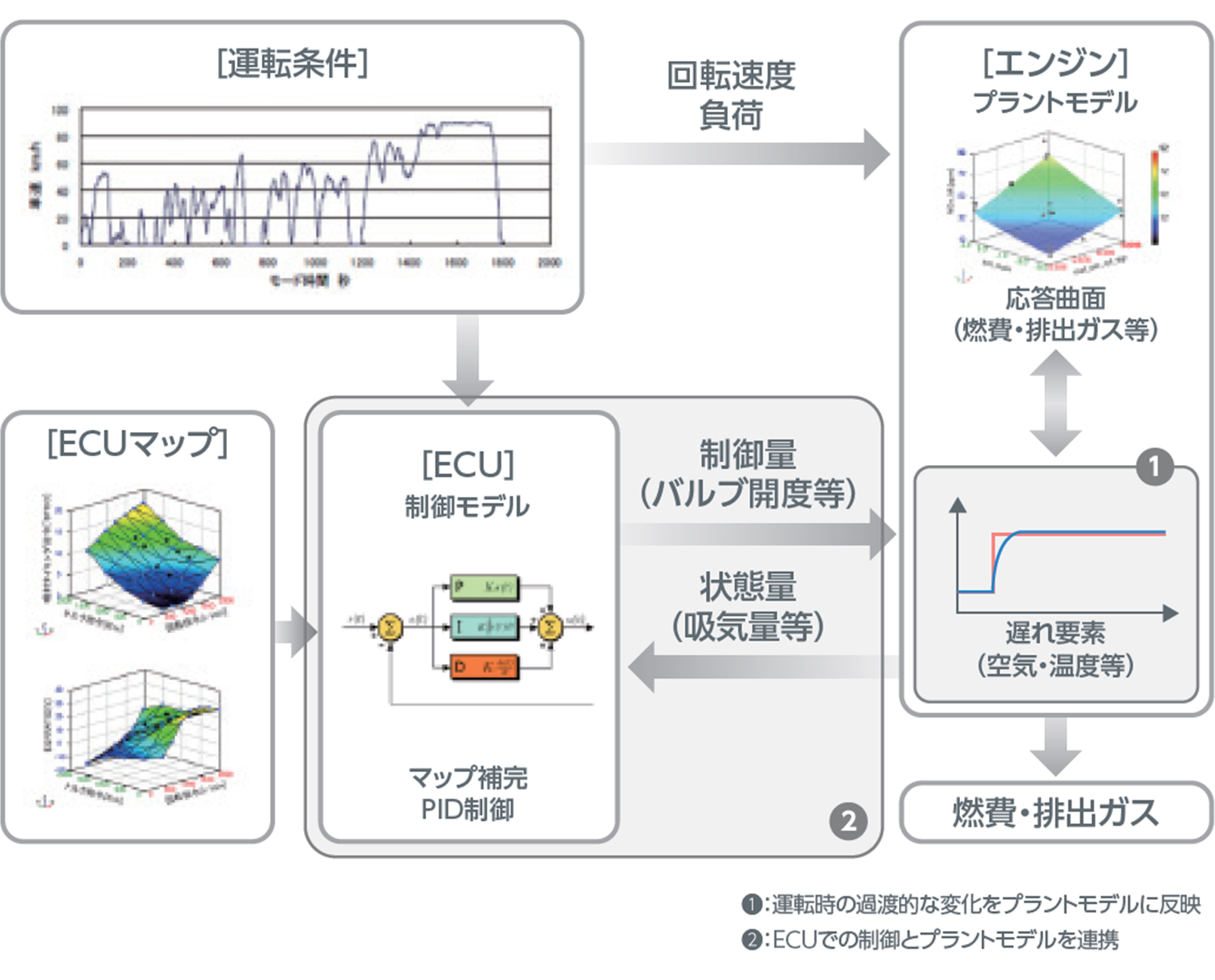
定常モデルに遅れ成分や温度等の状態量を接続することで過渡シミュレーションの精度を向上することができます。 また、ECUの制御遅れ等もプラントモデルに接続することで、さらに精度向上が図れるとともに、制御定数の最適化を実施することができます。
過渡適合の考え方
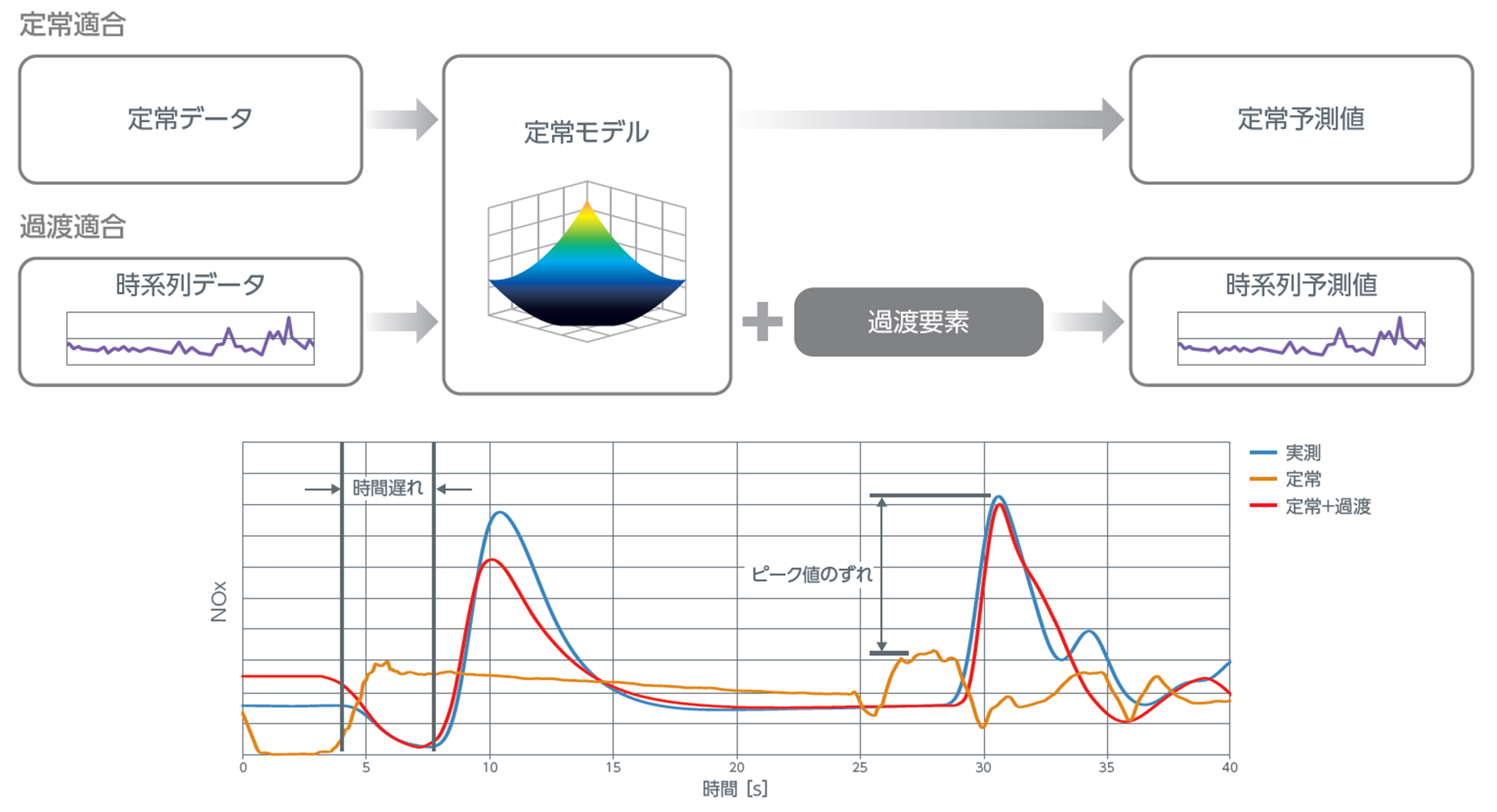
定常モデルをベースに、過渡要素を追加していきます。
過渡シミュレーションモデルは、時系列データを入力することで、時系列データをシミュレーションすることができます。
時系列のシミュレーションのため、温度や排出ガスの遅れを再現することが重要です。