RC-S 実車トランジェントベンチ

次世代自動車の各種性能を、タイヤの要素を含まずに評価できるシステムです。
シャシダイナモでは実現できない過渡的な挙動を再現し、電動車をターゲットとした回生ブレーキを含めた車両制御評価や、ロードノイズを除いた車両騒音計測が可能です。また、自動運転機能の評価にも対応可能なシステムです。
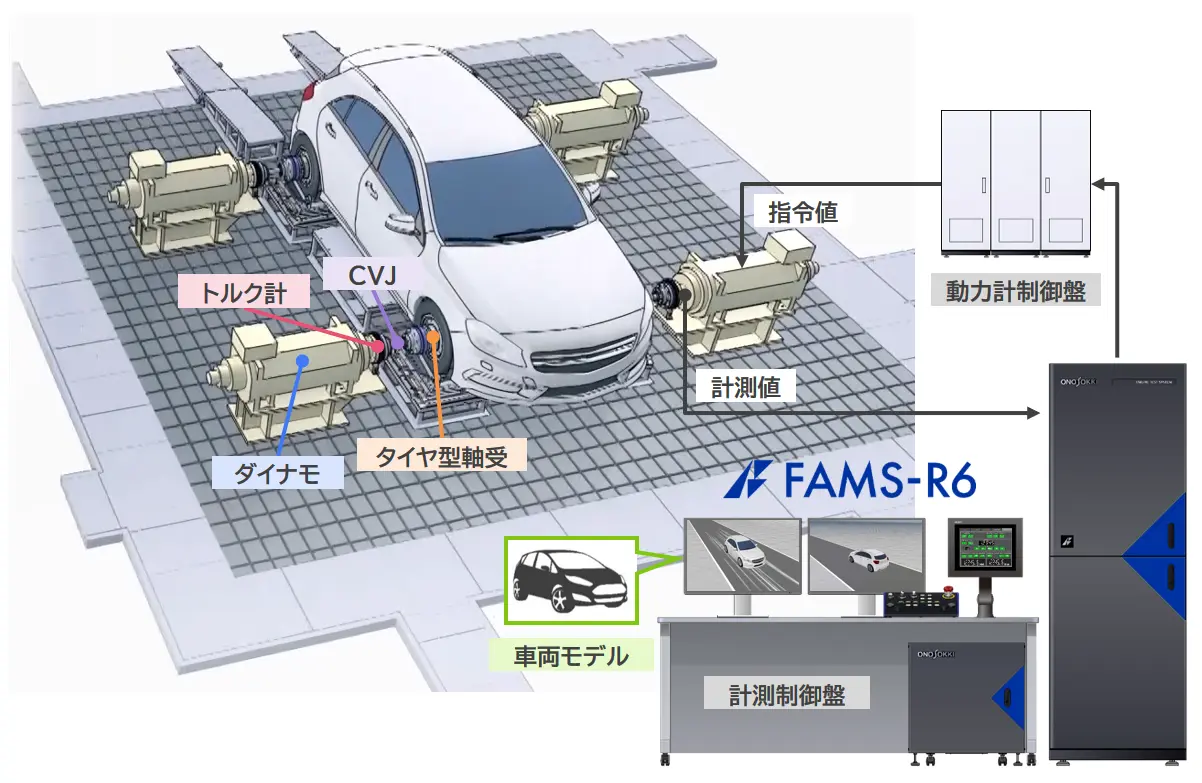
RC-Sは、リアルタイムモデル演算と低慣性モーターを組み合わせることにより、実車でのトランジェント試験を実現しています。実車のホイールをタイヤ型軸受に換装し、アクスル軸を車両の外側に取り出して低慣性モーターに接続することで、タイヤの要素を除いた各種評価を可能にしています。
また、ADAS/AD検証用シミュレーションツールと接続することで、台上でレーン・キープ・アシストなどの自動運転機能も評価できます。
測定システム
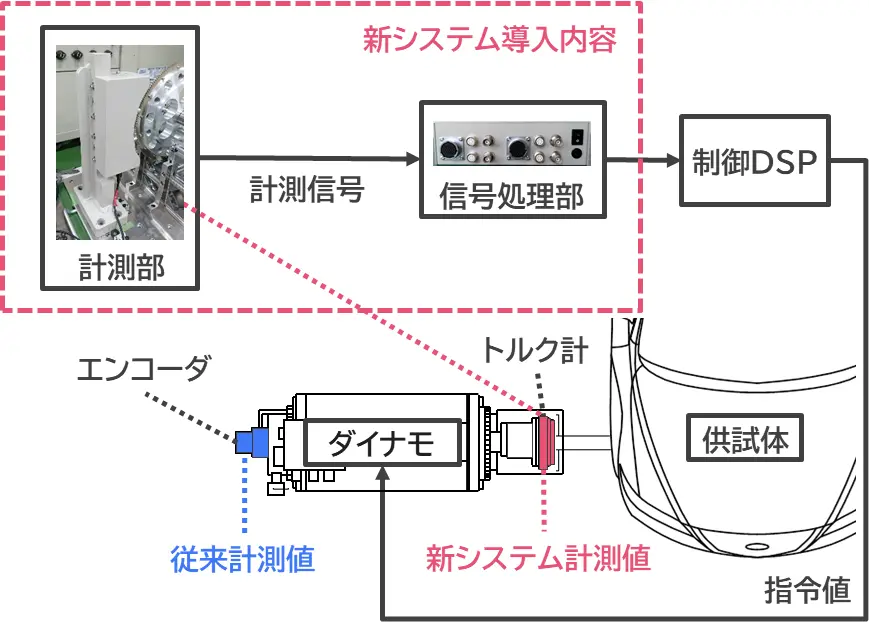
低回転速度計測制御システム(オプション)
システム構成図
当社 HILベンチシステム で採用されるトルク計の回転検出歯車に本システムを設置し、得られた高応答な計測信号を制御FB信号として制御DSPに取り込むことで、ダイナモ制御性を向上させることができます。
効果検証
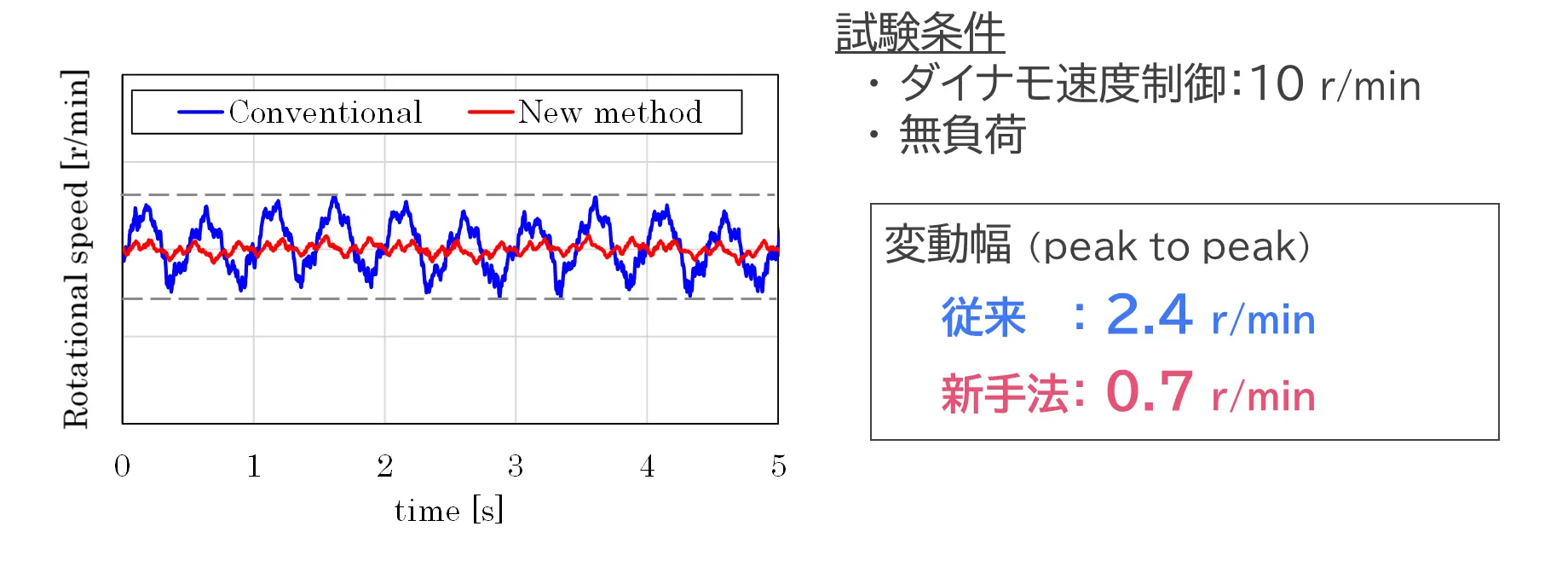
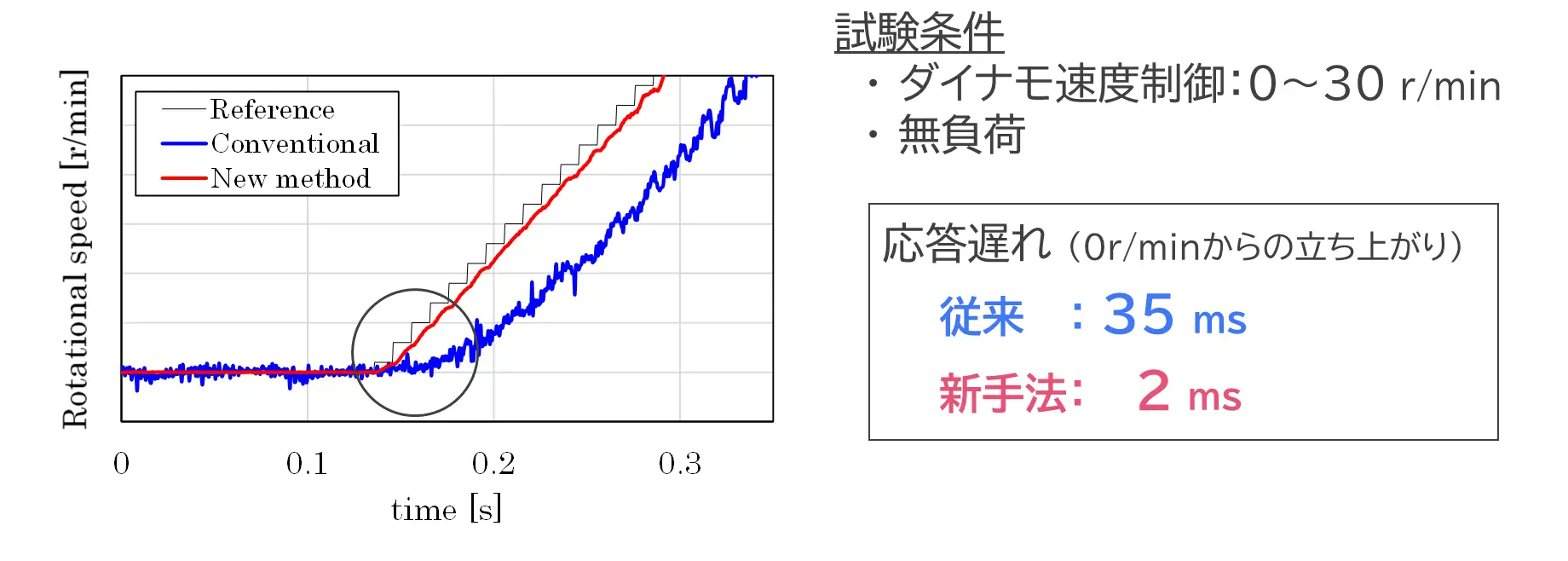
本システムを採用した場合の、指令値追従性検証です。本システムにより計測分解能が増え、回転速度指令値に対する追従性が大幅に向上しています。
一定回転での安定性
回転速度ゼロからの回りだし
運転事例
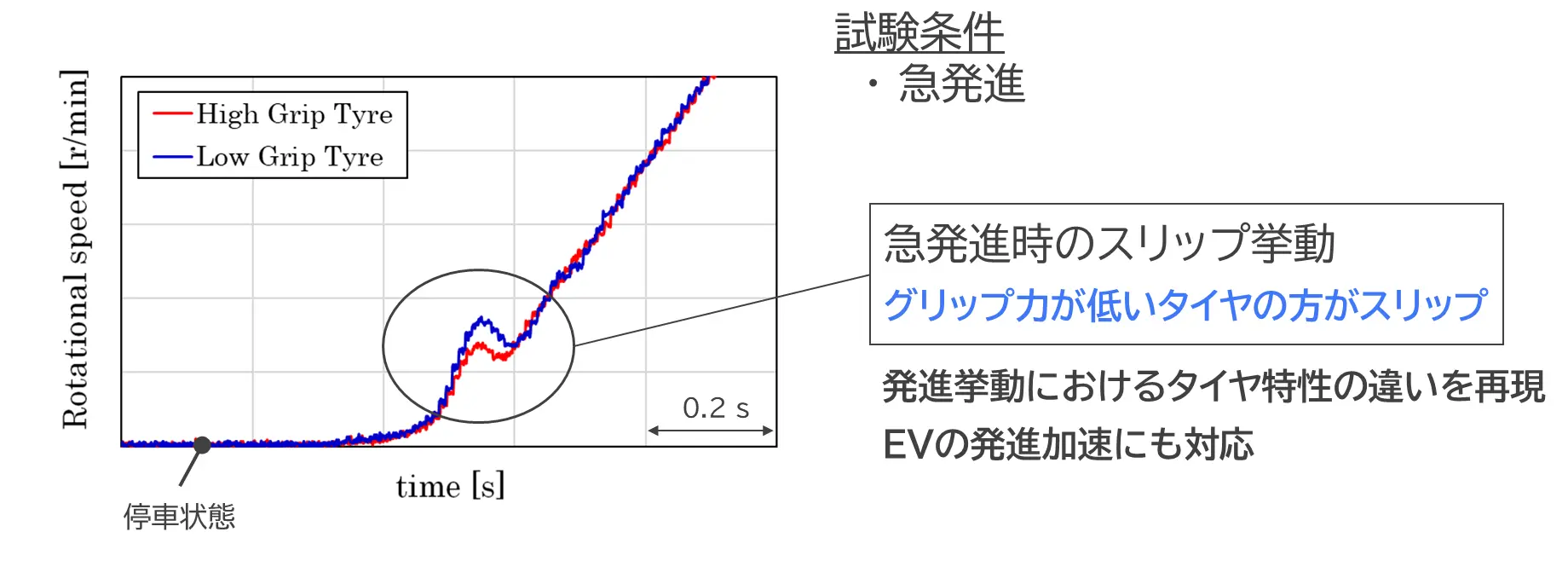
本システムを採用することで、従来の計測手法による計測応答性では検証が困難であった、極低速領域での発進挙動におけるタイヤ特性の違いを再現できることを確認しました。
発進加速 タイヤモデル違いの比較
ADAS/AD車 評価システム例
ADAS/AD開発用シミュレーションツールと連携し、台上で実車走行環境を模擬します。
各種センサー疑似装置やセンサーモデルと連携し、ADAS/AD車のシステム検証やAI学習を台上で実現します。
今までシミュレーションやテストコースでしかできなかった開発・評価を台上でできることで、安全に、確実なADAS/AD車開発を実現できます。

動作例-1 自動車専用道路の走行シナリオの動作事例
各種シミュレータとRC-Sが連携し、多様な走行シナリオを安全に評価が可能です。
* 本動画は、株式会社バーチャルメカニクス様、株式会社理経様 のご協力により製作しました
動作例-2 一般道走行シナリオ(衝突被害軽減ブレーキ/車線逸脱警報)動作事例
RC-SでADAS機能に多く用いられているカメラセンサー、ミリ波レーダーセンサーを実車状態で安全かつ効率よく評価することが可能です。
事例は衝突の可能性がある衝突被害軽減ブレーキ、車線逸脱警報の評価シナリオの動作例となります。
もう一つの使い方として、カーナビゲーションシステムと連携が可能なため、ナビゲーション情報を用いたECU制御技術の台上検証に使用可能です。
* 本動画は当社が協力し、dSPACE Japan 株式会社様にて製作されたものです