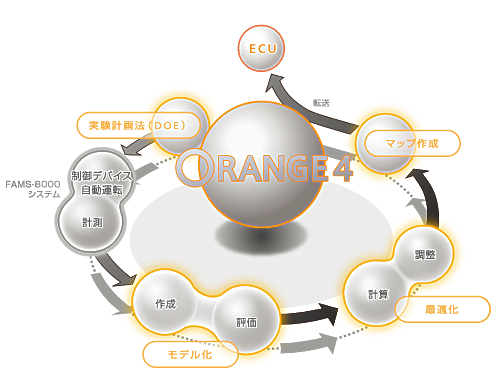
燃費低減や排ガス対策への対応に迫られる自動車エンジン試験の現場で、これまで数多くの実績を築いてきたECUマップ最適化支援ツール「ORANGE」。
バージョン4では、モデル化手法について高次多項式モデルとRBFモデルを搭載し、さらに複雑なモデルの作成を可能としたほか、新たに遺伝的アルゴリズム(GA)を搭載したことにより、より効果的な多目的最適化を実現しました。
特長
複数グループの複数モデル・最適化結果・ECUマップを、一括でプロジェクト管理可能です。
さまざまな応答に適したモデルを作成できます。
複数の3Dグラフが同期して回転する連動機能により、容易に比較・評価ができます。
複数の最適化候補から、任意の最適点を選ぶことができます。
ECUマップの3Dグラフを見ながら、最適値を直接調整できます。
高次多項式モデルとRBFモデルを搭載し、さらに複雑なモデルを作成することが可能。
最新の遺伝的アルゴリズム(GA)を搭載し、多目的最適化を一段と強化。
運転領域全体のパフォーマンスを把握しながら、最適値を選考できるグローバル最適化を搭載。
各種パラメータを調整して、規制値内で滑らかなECUマップを作成可能。
画面説明例
DOE Planner の特長
● 運転スケジュールと実行計画結果を統合管理
● FAMSシステムで実行可能な運転スケジュールを生成
● 各種グラフによる実験計画結果の評価が可能
● 全ての設定情報は、1つのプロジェクトファイルで管理
● 実験計画結果は、CSVファイルとしてエクスポート
FAMS システムと連携
FAMS-8000自動運転計測システムに運転スケジュールを転送できます。これにより、エンジンの運転、外部計測装置の制御、および実験計画に基づくECU制御の運転計測を容易に実行することができます。
より柔軟な実験計画法に対応
central-composite, face-centered-cube,Box-Behnken,全因子計画、D最適などの実験計画法を搭載し、実験をデザインすることができます。D最適計画は、従来の表形式の実験計画に比べ、より柔軟な実験計画ができます。
モデル化
採取したデータを基に近似式を作成することができます。
2次多項式モデルでは制度に不足がある場合は、物理現象に合わせて最大5次までのモデルを作成できます。
RBFモデル
局材化してガウス関数の重ね合わせにより任意関数の補完を行う手法です。他の近似モデルでは適用できないような、多峰性のある応答に対しても適用できます。
ステップワイズ
重回帰分析を行う場合、説明力の高い少数設計変数で、適合度の高いモデルができることが理想です。ステップワイズとは、無駄な設計変数を省き、かつ適合度の高いモデルを作成する手法です。
モデルの評価
作成したモデルの確認は、4種類の画面(プロット残差診断グラフ・応答曲面グラフ・寄与度グラフ・サマリー表示)を用意しており、作成したモデルが適当かどうかの評価が可能です。このほか散布行列グラフなどからも、モデルの評価が行えます。
散布行列グラフ
単一目的化 / 多目的最適化
ある制約条件の中で、ある目的関数を与え、最小化または、最大化する問題を単一目的最適化問題と呼びます。最大9個の制約条件を設定することができます。一方、現実に存在するさまざまな問題を考えた場合、目的関数は複数存在することあが多く、単一目的最適化では対応できないケースがあります。一般に、このような問題を多目的最適化問題と呼びます。ORANGE4では、多目的最適化アルゴリズムを強化し、パレート解集合の効率的な探索を実現じました。
最新多目的GAを搭載
システムの中で自然淘汰のシミュレーションを行い最適解を求める遺伝的アルゴリズム(GA)を、多目的最適化に適応させました。ORNAGE4では、同志社大学工学部知的システムデザイン研究室 慶安助教授等により開発された多目的GAを採用しています。
多目的トレードオフ分析ツール
パレート散布グラフやパラレルグラフなど、多目的意思決定の支援機能が充実しています。多目的最適化問題でトレードオフの関係にある各目的に対して、求められるパレート最適解集合を適切に評価し、選好解の選択を可能にします。
グローバル最適化
排ガスモード試験では、グループ毎最適値の総和で評価します。この総和の条件が最適化の指標とすることで、グループ毎の最適値を求めることができます。
滑らかなECUマップが作成できるような、最適点を探査します
グローパルパレート解に制約をかけ、運転領域全体の規制を満たしつつ、滑らかなECUマップが作成できるような最適点を探査します。
ECUマップ
決定した最適点から任意のメッシュのマップを作成します。作成できるマップの大きさは、最大40X40となります。メッシュ点算出の補間方法としては、格子、三角分割、AKIMAを用意しています。
ECUマップの転送
作成したマップを、ASAM-MCD-3MCにより、ECUモニタへ転送できます。
動作環境
※処理するデータサイズによって、十分なCPU、メモリ、ハードディスクのスペックは異なります
*Windows® XP, Microsoft® は、米国 Microsoft Corporation の米国およびその他の国における登録商標または商標です。 *Intel®,Pentium® は米国 Intel Corporation の米国及びその他の国における登録商標です。
最終更新日:2009/02/16
● 記載事項は変更になる場合がございます。 ● 価格情報は皆様の便宜のために参考用として記載された日本国内価格です。
ご購入をご検討いただく場合には最寄りの弊社営業所または弊社代理店にご確認ください。