
![]()
![]()
![]()

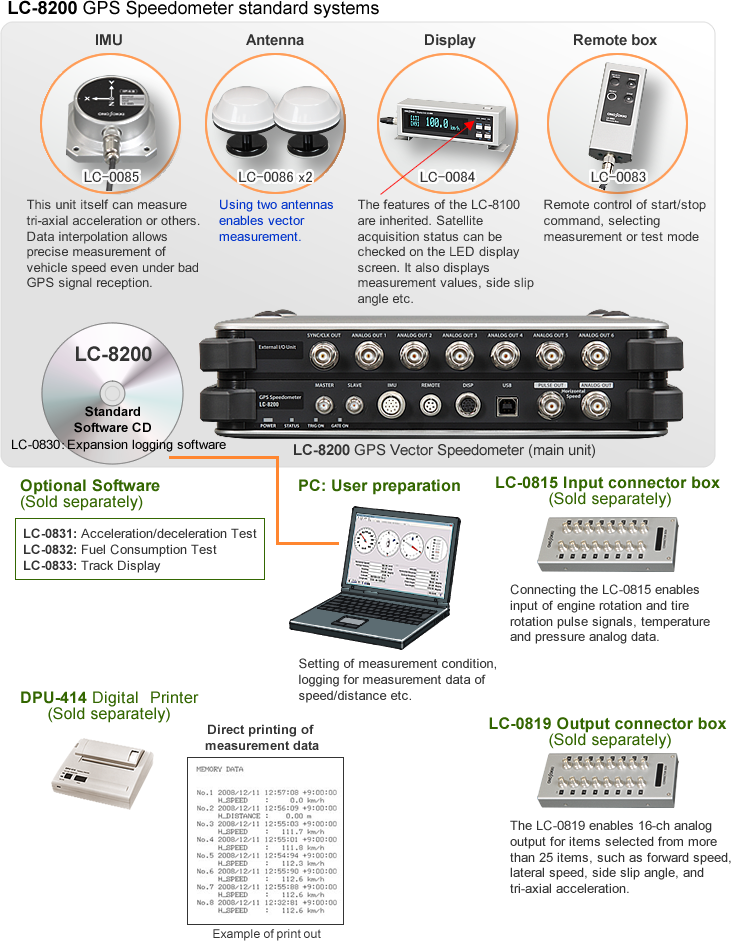
Above image:LC-8200 GPS Vector Speedometer
| · Compact design |
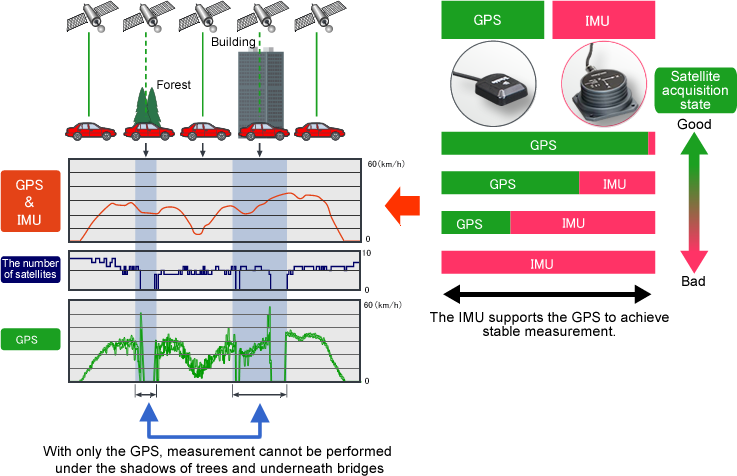
| · Using a GPS, the measurement is not affected by weather or road surface conditions. |
| · Even under bad GPS signal reception, standard IMU supports precise and stable measurement. |
| · Using GPS and IMU achieves highly precise measurement with update cycle of 100 Hz and delay time of 5 ms |
| · Because of the delay time of 5 ms or less, the LC-8000 series make it easier to perform various driving tests such as low-speed driving, acceleration and braking tests. |
| · Reliable calibration data (Traceability system diagrams, test result reports and calibration certificates) |
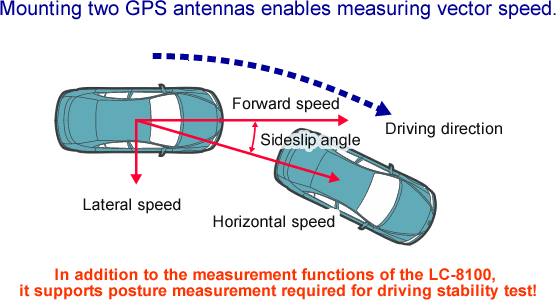
| · More than 30 items, such as forward speed, lateral speed, sideslip angle, moving distance, can be measured by the LC-8200. |
| · The LC-8200 provides 16-ch analog output function as standard. The output data can be selected from the obtained data (tri-axial acceleration, gradient angle etc.). |
| · If a satellite is lost, it can be recognized with LED and buzzer.(LC-8200: standard) |
| · Provided with 8-ch of analog input ant 2-ch of pulse signal input. (LC-8200: standard LC-8100:option) |
| · Various optional measurements by hardware; vertical direction, tri-axial acceleration, tri-axial angle etc. (LC-8200: standard LC-8100: option) |
| · Various optional vehicle tests by software; expansion logging, acceleration/deceleration test etc. (Function of expansion logging: standard for the LC-8200) |
Image of GPS and IMU complement
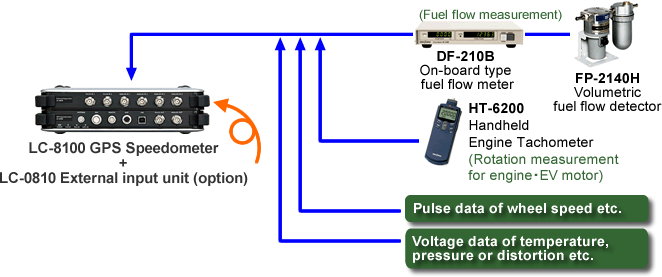
Example of usage <LC-8100 + LC-0810 (External input unit)>
The LC-8200 GPS Vector Speedometer
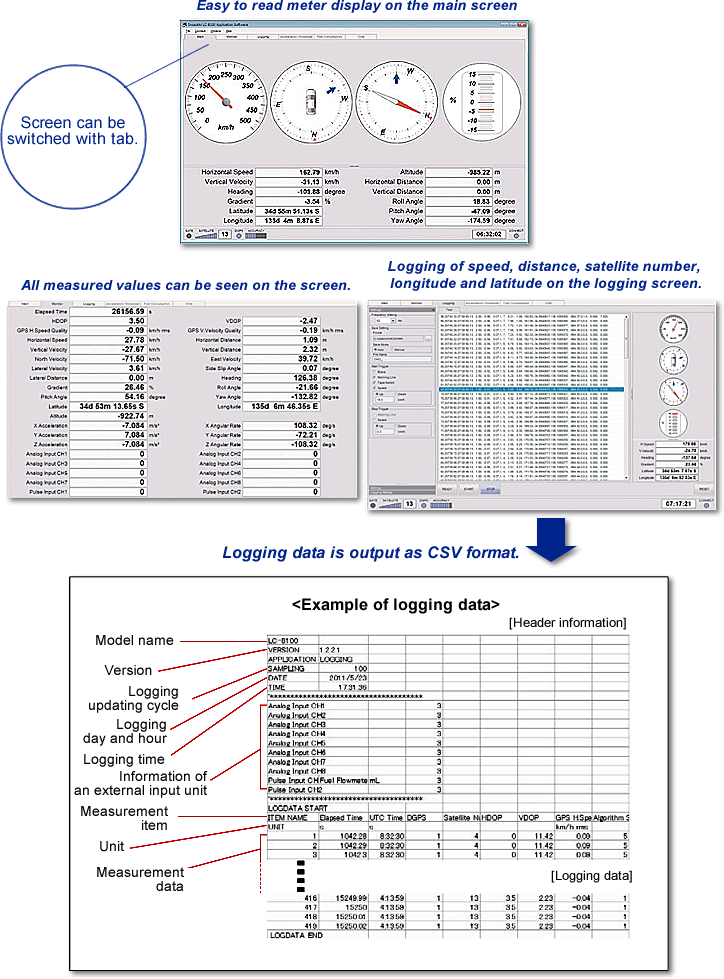
Data logging is possible with standard software Speed and distance in horizontal direction, driving direction, latitude, longitudinal, satellite situation
LC-0811 CAN Output function (LC-8100/8200: Hardware option) |
||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
|
||||||||||||
LC-0821 IMU Data output function (LC-8100:Hardware option, LC-8200: Standard function) |
||||||||||||
|
||||||||||||
LC-0822 Vertical direction measurement function (LC-8100: Hardware option, LC-8200: Standard function) |
||||||||||||
|
||||||||||||
LC-0830 Expansion logging software (LC-8100: Software option, LC-8200: Standard function) |
||||||||||||
 |
||||||||||||
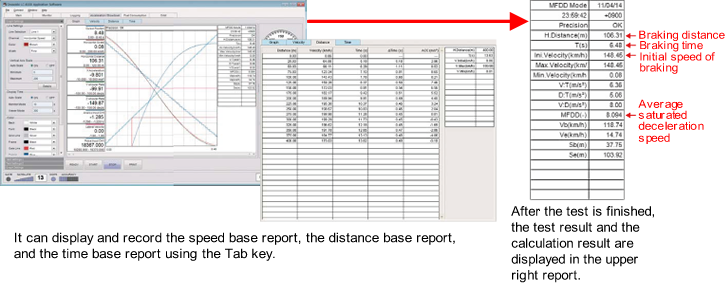
LC-0831 Acceleration / deceleration test software (LC-8100/8200: Software option) |
||||||||||||
 |
||||||||||||
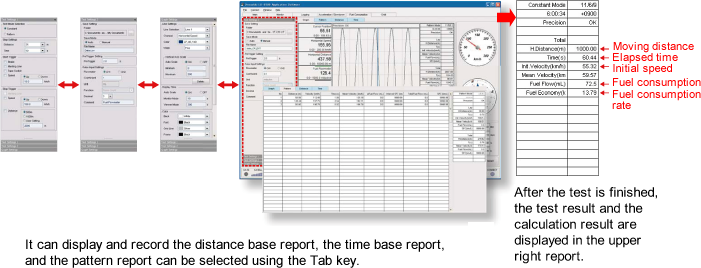
LC-0832 Fuel consumption test software (LC-8100/8200: Software option) |
||||||||||||
|
||||||||||||
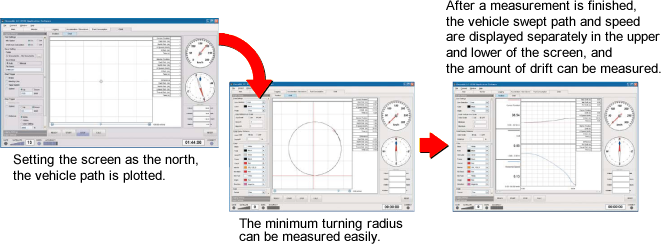
LC-0833 Track display software (LC-8100/8200: Software option) |
||||||||||||
 |
Comparison table between LC-8100 and 8200
¡: Available as standard Δ: Available as an option X: Not available
| Main item | Measurement | PC data logging | ||
|---|---|---|---|---|
| LC-8100 | LC-8200 | LC-8100 | LC-8200 | |
| Horizontal speed | ¡ | ¡ | ¡ | ¡ |
| Horizontal distance | ¡ | ¡ | ¡ | ¡ |
| Forward speed | X | ¡*3 | X | ¡*3 |
| Forward distance | X | ¡*3 | X | ¡*3 |
| Lateral speed | X | ¡*3 | X | ¡*3 |
| Lateral distance | X | ¡*3 | X | ¡*3 |
| Vertical speed | Δ*1 | ¡ | Δ*5 | ¡ |
| Vertical distance | Δ*1 | ¡ | Δ*5 | ¡ |
| Slope | Δ*1 | ¡ | Δ*5 | ¡ |
| Number of satellites | ¡ | ¡ | ¡ | ¡ |
| Traveling direction | ¡ | ¡*4 | ¡ | ¡*4 |
| Latitude | ¡ | ¡ | ¡ | ¡ |
| Longitude | ¡ | ¡ | ¡ | ¡ |
| Altitude | ¡ | ¡ | ¡ | ¡ |
| Sideslip angle | X | ¡*3 | X | ¡*3 |
| Yaw, pitch, roll angles | Δ*2 | ¡ | Δ*6 | ¡ |
| XYZ acceleration (IMU coordinate axes) |
Δ*2 | ¡ | Δ*6 | ¡ |
| XYZ angular speed (IMU coordinate axes) |
Δ*2 | ¡ | Δ*6 | ¡ |
| XYZ acceleration (Vehicle coordinate axes) |
X | ¡*3 | X | ¡*3 |
| XYZ angular speed (Vehicle coordinate axes) |
X | ¡*3 | X | ¡*3 |
| Vehicle posture angle | X | ¡*3 | X | ¡*3 |
*1Available by adding the LC-0822 (Vertical direction measurement function).
*2Available by adding the LC-0821 (IMU data output function).
*3Requires two or more of antennas.
*4The direction of north: 0 degree
*5Logging is available by adding the LC-0822 (Vertical direction measurement function) and the LC-0830 series (software options).
*6Logging is available by adding the LC-0821 (IMU data output function) and the LC-0830 series (software options).
| Function | Content | LC-8100 | LC-8200 | |
|---|---|---|---|---|
| Function of hardware (Main unit) | Interval horizontal direction measurement (time duration, moving distance and speed data in horizontal direction from START to STOP) | ● | ● | |
| Displayed data can be stored in the memory of the main body. | ● (8 data) | ● (32 data) | ||
| Basic starting acceleration test (arrival time to the specified distance) | ● | ● | ||
| Basic braking test (MFDD, initial speed, stop time, stop distance) | ● | ● | ||
| Interval lateral direction measurement (maximum distance value in lateral direction from START to STOP, maximum sideslip angle value) | - | ●*1 | ||
| Synchronous signals can be output to an external device. | - | ● | ||
| Function to perform calibration when measuring the forward speed and the lateral speed. | - | ● | ||
| With 12V-power output function for a sensor | ¡(LC-0810) | ● | ||
| Interval vertical direction measurement (time duration, moving distance, speed data in vertical direction from START to STOP ) | ¡(LC-0822) | ● | ||
| Function of hardware (Main unit) | External input | Enables signal input of analog 8-ch, pulse 2-ch | ¡(LC-0810) | ● |
| CAN (Controller Area Network) output function | CAN communication enables output of speed, distance and satellite acquisition state. | ¡(LC-0811) | ¡(LC-0811) | |
| Adding the LC-0821 (IMU data output function) enables data output of angle, angular speed, acceleration. | ¡(LC-0811) | ¡(LC-0811) | ||
| Adding the LC-0822 (Vertical direction measurement function) enables data output of relative height, vertical speed. | ¡(LC-0811) | ¡(LC-0811) | ||
| IMU data output function*2 | Measures tri-axial acceleration, angle, angular speed and displays them to a display unit. | ¡(LC-0821) | ● | |
| Vertical direction measurement function*2 | Measures speed, distance and gradient angle in vertical direction, and displays them to a display unit. | ¡(LC-0822) | ● | |
| External analog output | By selecting 16-ch from the measurement items, analog output can be performed. | -*5 | ● | |
| Function of software (main unit) | Measurement and display of speed/distance in horizontal direction, travelling direction | ● | ● | |
| Function of software (main unit) |
Setting of GPS, measurement conditions etc. | ● | ● | |
| Display and logging of horizontal speed/distance, driving direction, latitude, longitude and satellite acquisition state | ● | ● | ||
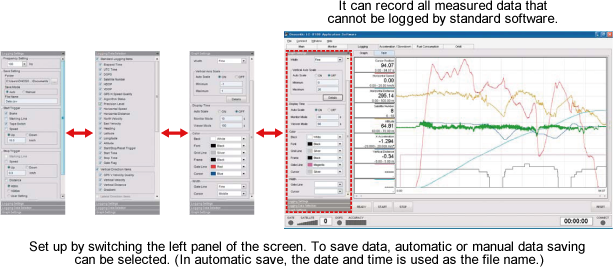
| Expansion logging software | Recording of all data measured in data sampling of maximum 100 Hz. | ¡(LC-0830) | ● | |
| Logging of external input data (by LC-0810) | ¡(LC-0830) | ● | ||
| Logging of IMU output data (by LC-0821) | ¡(LC-0830) | ● | ||
| Logging of measurement data in vertical direction (by LC-0822) | ¡(LC-0830) | ● | ||
| Acceleration/deceleration test software *3 | Display of elapsed time in acceleration test (0 to 400, 0 to 1000 m) | ¡(LC-0831) | ¡(LC-0831) | |
| MFDD calculation in braking test | ¡(LC-0831) | ¡(LC-0831) | ||
| Display of deceleration speed/elapsed time in ABS test | ¡(LC-0831) | ¡(LC-0831) | ||
| Display of acceleration/braking test data in V-STEP/D-STEP/T-STEP modes | ¡(LC-0831) | ¡(LC-0831) | ||
| Fuel consumption test software *4 | Data output in D-STEP/T-STEP modes at “F-PATTERN” test | ¡(LC-0832) | ¡(LC-0832) | |
| Calculation and display of fuel consumption/fuel consumption rate/ accumulated fuel consumption | ¡(LC-0832) | ¡(LC-0832) | ||
| Enables “F-CONT” test and “F-PATTERN” test by input of the pulse signal from the DF-210B to the LC-0810. | ¡(LC-0832) | ¡(LC-0832) | ||
| Track display software | Display of vehicle path, measurement of minimum turning radius measurement | ¡(LC-0833) | ¡(LC-0833) | |
*1 Available when two antennas are used.
*2 External output is possible by CAN output function or Expansion logging function.
*3 The same function as the power performance test system in the previous models (LC-5200/5200).
*4 The same function as the fuel consumption performance test system in the previous models (LC-5100/5200).
*5 Only the speed in horizontal direction is output.
LC-8100/8200
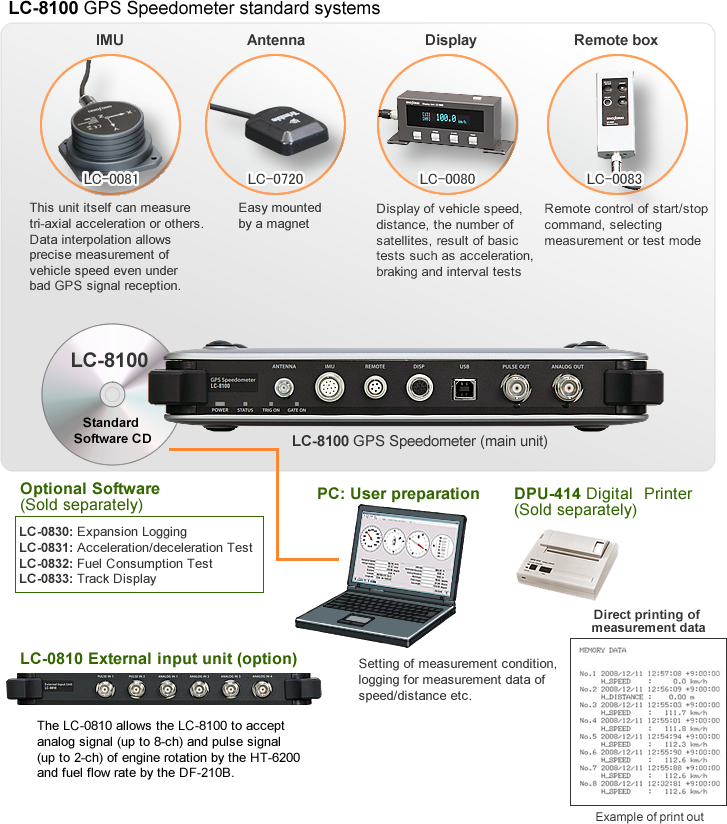
| LC-8100 GPS Speedometer |
LC-8200 GPS Vector Speedometer |
|||
|---|---|---|---|---|
| Horizontal speed | Measurement range | 0.1 to 500.0 km/h | ||
| Accuracy | ±0.1 km/h *1 | |||
| Horizontal distance | Accuracy | ±0.05 % *2 | ||
| Forward speed | Measurement range | - | -500.0 to 500.0 km/h | |
| Accuracy | - | ±0.2 km/h*3 | ||
| Forward distance | Accuracy | - | ±0.10%*4 | |
| Lateral speed | Measurement range | - | -20.0 to 20.0 m/s | |
| Accuracy | - | ±0.08 m/s *5 | ||
| Lateral distance | Accuracy | - | ±0.15 % *6 | |
| Sideslip angle | Measurement range | - | -25.0 to +25.0° | |
| Reference accuracy | - | 0.15°RMS *7 | ||
| Yaw | Measurement range | - | -180.0 to +180.0° | |
| Reference accuracy | - | ±0.1°RMS*8 | ||
| Vehicle posture angle | Measurement range | - | -180.0 to +180.0° | |
| Reference accuracy | - | ±0.1°RMS*8 | ||
| X,Y.X acceleration *9 | Measurement range | -98.0 to 98.0 m/s2 | ||
| Linearity | ±0.2%/FS (reference accuracy) | |||
| X,Y,Z angle speed*9 | Measurement range | -150.0 to 150.0°/s | ||
| Accuracy | ±0.1%/FS (reference accuracy) | |||
| Analog (speed) output section | Voltage range | 0 to 10 V / 0 to 500 km/h | ||
| Linearity | ± 0.2 % / FS | |||
| Output delay | 5 ms or less | |||
| Pulse (distance) output section | Resolution | 1,5,10 mm/P switchable | ||
| Level | TTL | |||
| User specified analog output | Item | - | Selectable 16-ch from followings; Horizontal/forward/lateral/vertical/north-direction/ east-direction speeds, number of satellite acquisitions, driving direction, sideslip/yaw/ pitch/roll angles, X,Y,Z acceleration (IMU/vehicle coordinate axes), X,Y,Z angular (IMU/vehicle coordinate axes), slope angle, satellite lost flag, vehicle posture angle | |
| Output voltage | - | -10.0 to 10.0V (Can be changed with PC software) | ||
| Linearity | - | ±0.5 % /FS | ||
| Delay time | - | 5 ms or less | ||
| External synchronous output | Output level | - | Rectangular wave pulse output t: Hi 5±0.5V, Lo 0.5 V or less | |
| Output frequency | - | 100 Hz | ||
| Analog input | -(Available by the LC-0810) | 8-ch (BNC x 4, D-Sub 15-pin x 1), Input voltage:±10 V/±20V | ||
| Pulse input | -(Available by the LC-0810 ) | 2-ch (BNCx2) Input: TTL Pulse conversion function: selectable from pulse count/frequency/duty. | ||
| Power source output | -(Available by the LC-0810) | DC12V±2V (approx. 4 VA or less) x 1ch | ||
| External trigger input/output | Input: start/stop signal (non-voltage contact・voltage contact) Output: gate signal | |||
| PC interface | USB 2.0 | |||
| General specification | Power requirement | DC 9 to 32 V / AC 100 to 240 V (use of the AC adapter: option) | ||
| Power consumption | 30 VA or less | |||
| Operating temperature range | 0 to 50 °C | |||
| Storage temperature range | -10 to 60 °C | |||
| Accessories | Antenna (LC-0720), Display unit (LC-0080), Remote box (LC-0083), IMU (LC-0081) and each connection cable, DC power cable, USB cable, BNC-BNC cable, CD-ROM of standard software, phoenix connector, IMU bracket, Instruction manuals | Antenna (LC-0086), Display unit (LC-0084), Remote box (LC-0083), IMU (LC-0085) and each connection cable, DC power cable, USB cable, CD-ROM, Antenna & IMU bracket, Expansion logging software (LC-0830), Instruction manuals | ||
| Outer dimensions (weight) | 271 (W) x 217 (D ) x 48 (H) mm (approx. 1.4 kg) | 271 (W) x 217 (D ) x 76 (H) mm (approx. 2.2 kg) | ||
| Remote box | Model name | LC-0083 | ||
| Function | Test start/stop command, clearing display area | |||
| Switch | START, STOP, RESET, SELECT | |||
| Outer dimensions (weight) | 45 (W) x 20 (D) x 115 (H) mm (approx. 100 g) | |||
| Display unit | Model name | LC-0080 | LC-0084 | |
| Display method | Fluorescent display tube (green) | |||
| Function | ●Display of setup conditions, test start/stop command, memory command | |||
| ●Display of speed, distance, number of capturing satellites, result of basic tests | ||||
| ●Selectable display mode: single row display or double row display | ||||
| ●Output command to the DPU-414 Digital printer (option) | ||||
| Outer dimensions (weight) | 179 (W) x 50 (D) x 71 (H) mm (approx. 30 g) |
216 (W) x 50 (D) x 71 (H) mm (approx. 450 g) |
||
| IMU | Model name | LC-0081 | LC-0085 | |
| Angular speed | Linearity | 0.1 % / FS (reference accuracy) | ||
| Measurement range | ±150°/ S (reference accuracy) | |||
| Acceleration | Linearity | 0.2 % / FS (reference accuracy) | ||
| Measurement range | ±98 m/s2 (reference accuracy) | |||
| Cable | 2.5 m | 5 m | ||
| Protection class | - | IP43 | ||
| Outer dimensions (weight) | 79 (W) x 79 (D) x 38.5 (H) mm (approx. 250 g) | 79 (W) x 79 (D) x 41 (H) mm (approx. 250 g/ 500 g when mounting magnet) | ||
| External input unit | Model name | LC-0810(option) | - | |
| Analog input | 8ch (BNC x 4, D-sub 15-pin x 1), Input voltage:±10 V / 20 V | - *10 | ||
| Pulse input | 2ch (BNC x 2), Input: TTL, Pulse conversion function: selectable from pulse count / frequency / duty | - *10 | ||
| Connector | D-Sub 15-pin, BNC x 6 | - | ||
| Power source output | DC12±2 V (approx. 4 VA or less) x 1ch | - *10 | ||
| Outer dimensions | 271 (W) x 217 (D) x 48 (H) mm | - | ||
| CAN output | Model name | LC-0811(option) | ||
| Standard | Based on Ver.2.0 B | |||
| Data | The information on speed, distance, number of satellites etc. are collected to an ID which can be freely setup. | |||
| Accessory | D-Sub 9-pin connector | |||
| Antenna | Model name | LC-0720 | LC-0086 | |
| Cable length | 5 m | 5 m | ||
| Operating temperature range | -40 to 85 °C | -40 to 70 °C | ||
| Protection class | - | IP43 | ||
| Outer dimensions (weight) |
31 (W) x 36 (D) x 12 (H) mm (approx. 100 g) | φ180 (W) x 70 (H) mm (approx. 900 g) |
||
| Connector box | Input | Model name | - | LC-815 (option) |
| Connector | - | BNC x 16, D-Sub 37-pin x 1 | ||
| Output | Model name | - | LC-0819 (option) | |
| Connector | - | BNC x 16, D-Sub 37-pin x 1 | ||
| Outer dimensions (weight) |
- | 230 (W) x 100 (D) x 28 (H) mm (approx. 750 g) |
||
| Others | Options | Power cable for cigarette lighter socket (LC-0730), windshield attachment (LC-0740), carrying case (LC-0813), digital printer (DPU-414), tape switch |
Power cable for cigarette lighter socket (LC-0730), carrying case (LC-0814), digital printer (DPU-414), tape switch |
|
Recommended PC operation environment |
OS:Windows®
XP(SP3)/7[32 bit], Memory: 1 GB or more, HDD: 80 GB or more |
|||
| CPU:Intel® Core 2 Duo / 2 GHzor more, USB: 1 port or more | ||||
| Screen
resolution: XGA (1024 x 768) or more at PC operating environment |
||||
*1 The described value is the accuracy with 30 km/h or more of horizontal speed, and 7 or more of satellite acquisitions.
30 km/h or less of horizontal speed and 7 or more of satellite acquisitions: 0.3 km/h or less. 7 or less of satellite acquisitions
without multipath: 0.6 km/h.
*2 The described value is the accuracy when it is measured at distance of 300 m, horizontal speed of 30 km/h or more,
and 7 or more of satellite acquisitions. 300 m of measurement distance, 30 km/h or less of horizontal speed, 7 or more of
satellite acquisitions: ±0.3 % 7 or less of satellite acquisitions without multipath: ±0.5 %
*3 The described value is the accuracy with 7 or more satellite acquisitions when the distance between antennas is 2 m and the horizontal
speed is 100 km/h. 4 or more satellite acquisitions when the distance between antennas is 2 m and the horizontal speed is 100 km/h: ±0.8 km/h
*4 The described value is the accuracy with 7 or more satellite acquisitions when the distance between antennas is 2 m and the horizontal
speed is 100 km/h. 4 or more satellite acquisitions when the distance between antennas is 2 m and the horizontal speed is 100 km/h: ±0.70 %
*5 The described value is the accuracy with 7 or more satellite acquisitions when the distance between antennas is 2 m and the horizontal
speed is 100 km/h. 4 or more satellite acquisitions when the distance between antennas is 2 m and the horizontal speed is 100 km/h: ±0.20 m/s
*6 The described value is the accuracy with 7 or more satellite acquisitions when the distance between antennas is 2 m and the horizontal
speed is 100 km/h. 4 or more satellite acquisitions when the distance between antennas is 2 m and the horizontal speed is 100 km/h: ±0.65 %
*7 The described value is the accuracy with 7 or more satellite acquisitions when the distance between antennas is 2 m and the horizontal
speed is 30 km/h. 4 or more satellite acquisitions when the distance between antennas is 2 m and the horizontal speed is 30 km/h: 0.30°RMS
*8 The described value is the accuracy with 7 or more satellite acquisitions when the distance between antennas is 2 m. 4 or more satellite
acquisitions when the distance between antennas is 2 m: ±0.2°RMS
*9 LC-8100:Optional function, LC-8200: Function provided as standard
*10 LC-8100:Optional function, LC-8200: Function provided as standard
*Microsoft®, Windows® XP, Windows® 7 are registered trademarks or trademarks of Microsoft
Corporation in the United States and other countries.
*Intel® Core is a registered trademark of Intel Corporation in the United States and other countries.
Other options
| LC-0730 Power cable for cigarette light socket |
LC-0740 Windshield attachment |
LC-0813 Carrying case(for LC-8100) |
|---|---|---|
 |
 |
 |
| Tape switch | DPU-414 Digital Printer |
LC-0814 Carrying case(for LC-8200) |
|---|---|---|
 |
 |
Revised:2012/11/01
